Introduction
This book contains a collection of Rust Exercises, written by Ferrous Systems. See ferrous-systems.com/training for more details or a custom quote. You can view this material on-line at https://rust-exercises.ferrous-systems.com.
We use these exercises as part of our Rust Training, but you are welcome to try them for yourself as well.
Source Code
The source code for this book can be found at https://github.com/ferrous-systems/rust-exercises. It is open sourced as a contribution to the growth of the Rust language.
If you wish to fund further development of the course, why not book a training with us!
Icons and Formatting we use
We use Icons to mark different kinds of information in the book:
- ✅ Call for action
- ❗️ Warnings, Details that require special attention
- 🔎 Knowledge, that gets you deeper into the subject, but you do not have to understand it completely to proceed.
- 💬 Descriptions for Accessibility
Note: Notes like this one contain helpful information
Course Material
We have attempted to make our material as inclusive as possible. This means, that some information is available in several forms, for example as a picture and as a text description. We also use icons so that different kinds of information are visually distinguishable on the first glance. If you are on a course and have accessibility needs that are not covered, please let us know.
License

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
We encourage the use of this material, under the terms of the above license, in the production and/or delivery of commercial or open-source Rust training programmes.
Copyright (c) Ferrous Systems, 2026
Fizzbuzz
In this exercise, you will implement your first tiny program in rust: FizzBuzz. FizzBuzz is easy to implement, but allows for application of Rust patterns in a very clean fashion. If you have never written Rust before, use the cheat sheet for help on syntax.
After completing this exercise you are able to
- write a simple Rust program
- create and return owned
Strings - use conditionals
- format strings with and without printing them to the system console
- write a function with a parameter and return type.
Prerequisites
For completing this exercise you need to have
- basic programming skills in other languages
- the Rust Syntax Cheat Sheet
Task
-
Create a new project called
fizzbuzz -
Define a function
fn fizzbuzzthat implements the following rules:- If
iis divisible by3, return the String “Fizz” - If
iis divisible by5, return the String “Buzz” - If
iis divisible by both3and5, return the String “FizzBuzz” - If neither of them is true return the number as a String
- If
-
Write a main function that implements the following:
- Iterate from
1to100inclusive. - On each iteration the integer is tested with
fn fizzbuzz - print the returned value.
- Iterate from
If you need it, we have provided a complete solution for this exercise.
Knowledge
Printing to console
The recommended way to print to the console in this exercise is println!. println! always needs a format string - it uses {} as a placeholder to mean print the next argument, like Python 3 or C#.
#![allow(unused)]
fn main() {
let s = "Fizz";
println!("The value is s is {}. That's nice.", s);
}Creating Strings
The two recommended ways to get a String type for this exercise are:
#![allow(unused)]
fn main() {
// 1.
let s = "Fizz".to_string();
let i = 4;
let s = i.to_string();
// 2.
let s = format!("Fizz");
let i = 4;
let s = format!("{}", i);
}We’ll cover these in more detail later, but either can be used to convert string literals ("hello") and integers (123) into values of type String, which is all you’ll need here. We’ll use format! in our examples. It’s flexible and equally efficient as other methods.
Returning data
If you have issues returning data from multiple branches of your solution, liberally use return.
#![allow(unused)]
fn main() {
fn returner() -> String {
let x = 10_u32;
if x.is_multiple_of(5) {
return format!("Buzz");
}
format!("Fizz")
}
}Step-by-Step-Solution
In general, we also recommend to use the Rust documentation to figure out things you are missing to familiarize yourself with it. If you ever feel completely stuck or that you haven’t understood something, please hail the trainers quickly.
Step 1: New Project
Create a new binary Cargo project, check the build and see if it runs.
Solution
cargo new fizzbuzz
cd fizzbuzz
cargo run
Step 2: Counting from 1 to 100 in fn main()
Print the numbers from 1 to 100 (inclusive) to console. Use a for loop.
Running this code should print the numbers from 1 to 100.
Solution
fn main() {
for i in 1..=100 {
println!("{}", i);
}
}Step 3: The function fn fizzbuzz
✅ Function Signature
Create the function with the name fizzbuzz. It takes an unsigned 32-bit integer as an argument and returns a String type.
Solution
#![allow(unused)]
fn main() {
fn fizzbuzz(i: u32) -> String {
unimplemented!()
}
}✅ Function Body
Use if statements with math operators to implement the following rules:
- If
iis divisible by3, return the String “Fizz” - If
iis divisible by5, return the String “Buzz” - If
iis divisible by both3and5, return the String “FizzBuzz” - If neither of them is true return the number as a String
Running this code should still only print the numbers from 1 to 100.
Solution
#![allow(unused)]
fn main() {
fn fizzbuzz(i: u32) -> String {
if i.is_multiple_of(3) && i.is_multiple_of(5) {
format!("FizzBuzz")
} else if i.is_multiple_of(3) {
format!("Fizz")
} else if i.is_multiple_of(5) {
format!("Buzz")
} else {
format!("{}", i)
}
}
}Step 4: Call the function
Add the function call to fn fizzbuzz() to the formatted string in the println!() statement.
Running this code should print numbers, interlaced with Fizz, Buzz and FizzBuzz according to the rules mentioned above.
Solution
fn fizzbuzz(i: u32) -> String {
if i.is_multiple_of(3) && i.is_multiple_of(5) {
format!("FizzBuzz")
} else if i.is_multiple_of(3) {
format!("Fizz")
} else if i.is_multiple_of(5) {
format!("Buzz")
} else {
format!("{}", i)
}
}
fn main() {
for i in 1..=100 {
println!("{}", fizzbuzz(i));
}
}Fizzbuzz Cheat Sheet
This is a syntax cheat sheet to be used with the Fizzbuzz exercise.
Variables
#![allow(unused)]
fn main() {
let thing = 42; // an immutable variable
let mut thing = 43; // a mutable variable
}Functions
// a function with one argument, no return.
fn number_crunch(input: u32) {
// function body
}
// a function with two arguments and a return type.
fn division_machine(dividend: f32, divisor: f32) -> f32 {
// function body
let quotient = dividend / divisor;
// return line does not have a semi-colon!
quotient
}
fn main() {
let cookies = 1000.0_f32;
let cookie_monsters = 1.0_f32;
// calling a function
let number = division_machine(cookies, cookie_monsters);
}for loops and ranges
#![allow(unused)]
fn main() {
// for loop with end-exclusive range
for i in 0..10 {
// do this
}
// for loop with end-inclusive range
for j in 0..=10 {
// do that
}
}if - statements
#![allow(unused)]
fn main() {
let number = 4;
if number == 4 {
println!("This happens");
} else if number == 5 {
println!("Something else happens");
} else {
println!("Or this happens");
}
// condition can be anything that evaluates to a bool
}is_multiple_of API
Might be more readable than using operators. Only works on unsigned types.
#![allow(unused)]
fn main() {
let var = 10_u32;
assert!(var.is_multiple_of(5));
}Operators (Selection)
| Operator | Example | Explanation |
|---|---|---|
!= | expr != expr | Nonequality comparison |
== | expr == expr | Equality comparison |
&& | expr && expr | Short-circuiting logical AND |
|| | expr || expr | Short-circuiting logical OR |
% | expr % expr | Arithmetic remainder |
/ | expr / expr | Arithmetic division |
Fizzbuzz with match
In this exercise you will modify your previously written fizzbuzz to use match statements instead of if statements.
After completing this exercise you are able to
- use
matchstatements - define a tuple
Prerequisites
For completing this exercise you need to have
- a working fizzbuzz
Task
Rewrite the body of fn fizzbuzz() so the different cases are not distinguished with if statements, but with pattern matching of a tuple containing the remainders.
If you need it, we have provided a complete solution for this exercise.
Knowledge
Tuple
A tuple is a collection of values of different types. Tuples are constructed using parentheses (), and each tuple itself is a value with type signature (T1, T2, …), where T1, T2 are the types of its members. Functions can use tuples to return multiple values, as tuples can hold any number of values, including the _ placeholder
#![allow(unused)]
fn main() {
// A tuple with a bunch of different types.
let long_tuple = (1u8, 2u16, 3u32, 4u64,
-1i8, -2i16, -3i32, -4i64,
0.1f32, 0.2f64,
'a', true);
}Step-by-Step-Solution
We assume you have deleted the entire function body of fn fizzbuzz() before you get started.
Step 1: The Tuple
Define a tuple that consists of the remainder of the integer i divided by 3 and the integer i divided by 5.
Solution
#![allow(unused)]
fn main() {
let i = 10_u32;
let multi_check_tuple = (i.is_multiple_of(3), i.is_multiple_of(5));
}Step 2: Add the match statement with its arms
The the for us relevant patterns of the tuple that we match for are a combination of 0 and the placeholder _ (underscore). _ stands for any value. Think about what combinations of 0 and _ represent which rules. Add the match arms accordingly.
Solution
#![allow(unused)]
fn main() {
fn fizzbuzz(i: u32) -> String {
let multi_check_tuple = (i.is_multiple_of(3), i.is_multiple_of(5));
match multi_check_tuple {
(true, true) => format!("FizzBuzz"),
(true, false) => format!("Fizz"),
(false, true) => format!("Buzz"),
(false, false) => format!("{}", i),
}
}
}Step 3: Shorten the code by matching on the tuple directly
Solution
#![allow(unused)]
fn main() {
fn fizzbuzz(i: u32) -> String {
match (i.is_multiple_of(3), i.is_multiple_of(5)) {
(true, true) => format!("FizzBuzz"),
(true, false) => format!("Fizz"),
(false, true) => format!("Buzz"),
(false, false) => format!("{}", i),
}
}
}Rustlatin
In this exercise we will implement a Rust-y, simpler variant of Pig Latin: Depending on if a word starts with a vowel or not, either a suffix or a prefix is added to the word
Learning Goals
You will learn how to
- create a Rust library
- split a
&strat specifiedchar - get single
charout of a&str - iterate over a
&str - define Globals
- compare a value to the content of an array
- use the Rust compiler’s type inference to your advantage
- to concatenate
&str - return the content of a
Vec<String>asString.
Prerequisites
You must be able to
- define variables as mutable
- use for loop
- use an if/else construction
- read Rust documentation
- define a function with signature and return type
- define arrays and vectors
- distinguish between
Stringand&str
For this exercise we define
- the Vowels of English alphabet →
['a', 'e', 'i', 'o', 'u'] - a sentence is a collection of Unicode characters with words that are separated by a space character (
U+0020)
Task
✅ Implement a function that splits a sentence into its words, and adds a suffix or prefix to them according to the following rules:
-
If the word begins with a vowel add prefix “sr” to the word.
-
If the word does not begin with a vowel add suffix “
rs” to the word.
For example, the sentence Implement a function that splits a sentence into its words becomes srImplement sra functionrs thatrs splitsrs sra sentencers srinto srits wordsrs.
The function returns a String containing the modified words.
Getting started
Find the exercise template in ../../../exercise-templates/rustlatin
The folder contains each step as its own numbered project, containing a lib.rs file. Each lib.rs contains starter code and a test that needs to pass in order for the step to be considered complete.
Complete solutions are available ../../../exercise-solutions/rustlatin
Knowledge
Rust Analyzer
A part of this exercise is seeing type inference in action and using it to help to determine the type the function is going to return. To make sure the file can be indexed by Rust Analyzer, make sure you open the relevant step by itself - e.g. exercise-templates/rustlatin/step1. You can close each step when complete and open the next one.
Step-by-step-Solution
Step 1: Splitting a sentence and pushing its words into a vector.
✅ Iterate over the sentence to split it into words. Use the white space as separator. This can be done with the .split() method, where the separator character ' ' goes into the parenthesis. This method returns an iterator over substrings of the string slice. In Rust, iterators are lazy, that means just calling .split() on a &str doesn’t do anything by itself. It needs to be in combination with something that advances the iteration, such as a for loop, or a manual advancement such as the .next() method. These will yield the actual object you want to use. Push each word into the vector collection_of_words. Add the correct return type to the function signature.
✅ Run the test to see if it passes.
Solution
#![allow(unused)]
fn main() {
fn rustlatin(sentence: &str) -> Vec<String> {
let mut collection_of_words = Vec::new();
for word in sentence.split(' ') {
collection_of_words.push(word.to_string())
}
collection_of_words
}
}Step 2: Concatenating String types.
✅ After iterating over the sentence to split it into words, add the suffix "rs" to each word before pushing it to the vector.
✅ To concatenate two &str the first needs to be turned into the owned type with .to_owned(). Then String and &str can be added using +.
✅ Add the correct return type to the function signature.
✅ Run the test to see if it passes.
Solution
#![allow(unused)]
fn main() {
fn rustlatin(sentence: &str) -> Vec<String> {
let mut collection_of_words = Vec::new();
for word in sentence.split(' ') {
collection_of_words.push(word.to_owned() + "rs")
};
collection_of_words
}
}Step 3: Iterating over a word to return the first character.
✅ After iterating over the sentence to split it into words, add the first character of each word to the vector.
✅ Check the Rust documentation on the primitive str Type for a method that returns an iterator over the chars of a &str. The char type holds a Unicode Scalar Value that represents a single character (although just be aware the definition of character is complex when talking about emojis and other non-English text).
Since iterators don’t do anything by themselves, it needs to be advanced first, with the .next() method. This method returns an Option(Self::Item), where Self::Item is the char in this case. You don’t need to handle it with pattern matching in this case, a simple unwrap() will do, as a None is not expected to happen.
✅ Add the correct return type to the function signature. Run the test to see if it passes.
Solution
#![allow(unused)]
fn main() {
fn rustlatin(sentence: &str) -> Vec<char> {
let mut collection_of_chars = Vec::new();
for word in sentence.split(' ') {
let first_char = word.chars().next().unwrap();
collection_of_chars.push(first_char);
};
collection_of_chars
}
}Step 4: Putting everything together: Comparing values and returning the content of the vector as String.
✅ Add another function that checks if the first character of each word is a vowel. contains() is the method to help you with this. It adds the prefix or suffix to the word according to the rules above.
Call the function in each iteration.
In fn rustlatin return the content of the vector as String. Run the tests to see if they pass.
Solution
#![allow(unused)]
fn main() {
const VOWELS: [char; 5] = ['a', 'e', 'i', 'o', 'u'];
fn latinize(word: &str) -> String {
let first_char_of_word = word.chars().next().unwrap();
if VOWELS.contains(&first_char_of_word) {
"sr".to_string() + word
} else {
word.to_string() + "rs"
}
}
}Step 5 (optional)
If not already done, use functional techniques (i.e. methods on iterators) to write the same function. Test this new function as well.
Solution
#![allow(unused)]
fn main() {
const VOWELS: [char; 5] = ['a', 'e', 'i', 'o', 'u'];
fn rustlatin_match(sentence: &str) -> String {
// transform incoming words vector to rustlatined outgoing
let new_words: Vec<_> = sentence
.split(' ')
.into_iter()
.map(|word| {
let first_char_of_word = word.chars().next().unwrap();
if VOWELS.contains(&first_char_of_word) {
"sr".to_string() + word
} else {
word.to_string() + "rs"
}
})
.collect();
new_words.join(" ")
}
}URLs, Match and Result
In this exercise you will complete a number of mini exercises to learn about
Error Handling. The final result will be a binary that reads lines from a
text file and distinguishes between URLs and non-URLs by using the url parsing library.
In this exercise, you will learn how to
-
handle occurring
Result-types withmatchfor basic error handling. -
when to use the
.unwrap()method. -
propagate an error with the
?operator -
return the
Option-type. -
do some elementary file processing (opening, reading to buffer, counting, reading line by line).
-
navigate the Rust
stdlibdocumentation -
add external dependencies to your project
Task
Find the exercise template here
../../../exercise-templates/urls-match-result
Find the solution to the exercise here
../../../exercise-solutions/urls-match-result.
You can run them with the following command: cargo run --example step_x, where
x is the number of the step.
-
Fix the runtime error in the template code by correcting the file path. Then, handle the
Resulttype that is returned from thestd::fs::read_to_string()with amatchblock, instead of using.unwrap(). -
Take the code from Step 1 and instead of using a
match, propagate the Error with?out offn main(). Note that yourmainfunction will now need to return something when it reaches the end. -
Take the code from Step 2, and split the
Stringinto lines using thelines()method. Use this to count how many lines there are. -
Change the code from Step 3 to filter out empty lines using is_empty and print the non-empty ones.
-
Take your code from Step 4 and write a function like
fn parse_url(input: &str) -> Option<url::Url>which checks if the giveninput: &stris a Url, or not. The function should returnSome(url)whereurlis of type Url, which is from theurlcrate. Use this function to convert each line and use the returned value to print eitherIs a URL: <url>orNot a URL.The
urlcrate has already been added as a dependency so you can just useurl::Url::parse
Knowledge
Option and Result
Both Option and Result are similar in a way. Both have two variants, and
depending on what those variants are, the program may continue in a different
way.
The Option type can have the variant Some(T) or None. T is a type
parameter that means some type should go here, we’ll decide which one later. The
Option type is used when you have to handle optional values. For example if
you want to be able to leave a field of a struct empty, you use the Option
type for that field. If the field has a value, it is Some(<value>), if it is
empty, it is None.
The variants of the Result type are Ok(t) and Err(e). It is used to handle
errors. If an operation was successful, Ok(t) is returned. In Ok(t), t can
be the empty tuple or some other value. In Err(e), e contains an error
message that can usually be printed with println!("Err: {:?}", e);.
Both types can be used with the match keyword. The received value is matched
on patterns, each leads to the execution of one of a number of different
expressions depending on which arm matches first.
How to use match
match is a way of controlling flow based on pattern matching. A pattern on the
left results in the expression on the right.
#![allow(unused)]
fn main() {
let value = true;
match value {
true => println!("This is true!"),
false => println!("This is false!"),
}
}Unlike with if/else, every case has to be handled explicitly, although you can use a catch-all pattern to cover ‘everything else’:
#![allow(unused)]
fn main() {
let value = 50_u32;
match value {
1 => println!("This is one."),
50 => println!("This is fifty!"),
_ => println!("This is any other number from 0 to 4,294,967,295."),
}
}There are different ways to use match:
The return values of the expression can be bound to a variable:
#![allow(unused)]
fn main() {
enum Season {
Spring,
Summer,
Fall,
Winter
}
fn which_season_is_now(season: Season) -> String {
let return_value = match season {
Season::Spring => String::from("It's spring!"),
Season::Summer => String::from("It's summer!."),
Season::Fall => String::from("It's Fall!"),
Season::Winter => String::from("Brrr. It's Winter."),
};
return_value
}
}In case of a Result<T, E>, match statements can be used to get to the inner value.
use std::fs::File;
fn main() {
let file_result = File::open("hello.txt");
let _file_itself = match file_result {
Ok(file) => file,
Err(error) => panic!("Error opening the file: {:?}", error),
};
}
All arms of the match tree have to either result in the same type, or they have to diverge (that is, panic the program or return early from the function)!
Template
Start your VSCode in the proper root folder to have
Rust-Analyzer working properly.
../../../exercise-templates/urls-match-result/
The template builds, but has a runtime error, as the location of the file is wrong. This is intentional.
Your code will use the example data found in
../../../exercise-templates/urls-match-result/src/data
Step-by-Step Solution
Step 1: Handle the Result instead of unwrapping it
std::fs::read_to_string returns a Result<T, E> kind of type, a quick way to
get to inner type T is to use the .unwrap() method on the Result<T, E>. The
cost is that the program panics if the Error variant occurs and the Error can
not be propagated. It should only be used when the error does not need to be
propagated and would result in a panic anyways. It’s often used as a quick fix
before implementing proper error handling.
✅ Check the documentation for the exact type std::fs::read_to_string returns.
✅ Handle the Result using match to get to the inner type. Link the two
possible patterns, Ok(some_string) and Err(e) to an an appropriate code
block, for example: println!("File opened and read") and println!("Problem opening the file: {:?}", e).
✅ Fix the path of the file so that the program no longer prints an error.
Click to see the code using the fixed path
fn main() {
let read_result = std::fs::read_to_string("src/data/content.txt");
match read_result {
Ok(_str) => println!("File opened and read"),
Err(e) => panic!("Problem opening and reading the file: {:?}", e),
};
}TIP: IDEs often provide a “quick fix” to roll out all match arms quickly
Step 2: Returning a Result from main
✅ Add Result<(), Error> as return type to fn main() and Ok(()) as the last
line of fn main().
✅ Delete the existing match block and add a ? after the call to
std::fs::read_to_string(...).
✅ Print something after the std::fs::read_to_string but before the Ok(()) so
you can see that your program did run. Try changing the file path back to the
wrong value to see what happens if there is an error.
Click to see the solution
fn main() -> Result<(), std::io::Error> {
let _file_contents = std::fs::read_to_string("src/data/content.txt")?;
println!("File opened and read");
Ok(())
}Step 3: Count the number of lines
✅ Take a look at the documentation of
std::lines. It
returns a struct Lines which is an iterator.
✅ Add a block like for line in my_contents.lines() { }
✅ Declare a mutable integer, initialized to zero. Increment that integer inside the for loop.
✅ Print the number of lines the file contains.
Click to see the solution
fn main() -> Result<(), std::io::Error> {
let file_contents = std::fs::read_to_string("src/data/content.txt")?;
println!("File opened and read");
let mut number = 0;
for _line in file_contents.lines() {
number += 1;
}
println!("{}", number);
Ok(())
}Step 4: Filter out empty lines
✅ Filter out the empty lines, and only print the the others. The is_empty method can help you here.
Click to see the solution
fn main() -> Result<(), std::io::Error> {
let file_contents = std::fs::read_to_string("src/data/content.txt")?;
println!("File opened and read");
for line in file_contents.lines() {
if !line.is_empty() {
println!("{}", line)
}
}
Ok(())
}Step 5: Check if a string is a URL, and return with Option<T>
✅ Write a function that takes (input: &str), parses each line and returns
Option<url::Url> (using the url::Url).
Search the docs for a method for this!
✅ If a line can be parsed successfully, return Some(url), and return None
otherwise.
✅ In the main function, use your new function to only print value URLs.
✅ Test the fn parse_url().
Click me
fn parse_url(line: &str) -> Option<url::Url> {
match url::Url::parse(line) {
Ok(u) => Some(u),
Err(_e) => None,
}
}
fn main() -> Result<(), std::io::Error> {
let file_contents = std::fs::read_to_string("src/data/content.txt")?;
println!("File opened and read");
for line in file_contents.lines() {
match parse_url(line) {
Some(url) => {
println!("Is a URL: {}", url);
}
None => {
println!("Not a URL");
}
}
}
Ok(())
}
#[test]
fn correct_url() {
assert!(parse_url("https://example.com").is_some())
}
#[test]
fn no_url() {
assert!(parse_url("abcdf").is_none())
}Help
Typing variables
Variables can be typed by using : and a type.
#![allow(unused)]
fn main() {
let my_value: String = String::from("test");
}Calculator
In this exercise we will implement a Reverse-Polish-Notation Calculator library.
You will learn:
- How to write libraries in Rust
- How to use tests to check library code
- How to model tree-like data structures in Rust using
enum - How to use
enumtypes to model custom errors - How to use turbofish syntax to assist type resolution
- How to handle simple text parsing in Rust
Task
Write a library that parses and evaluates math expressions that use Reverse-Polish (postfix) notation.
For example, a string "3 1 + 2 /" in this notation is equivalent to (3 + 1) / 2 but unlike the latter it does not force us to handle operator precedence using parentheses.
We will support the 4 basic math operations (+, -, *, /) that all will expect two operands, and a sqr operation to square a single number.
Here’s a basic grammar of expressions that we can expect:
expr =
number
| expr expr '+'
| expr expr '-'
| expr expr '*'
| expr expr '/'
| expr 'sqr'and here are some examples for you:
| Postfix Notation | Traditional notation | Value |
|---|---|---|
| 42 | 42 | 42 |
| 40 2 + | 40 + 2 | 42 |
| 1 3 + 2 / | (1 + 3) / 2 | 2 |
Hint: you can use these examples as basis for unit tests.
Our library should expose a pair of functions:
// Takes a string and produces an expression tree
pub fn parse(input: &str) -> Result<Expr, ParseError>
// Evaluates the expression
pub fn eval(expr: &Expr) -> Result<i64, ParseError>Expr type
The Expr type has to represent any math expression we can encounter, from a simple number to a complex nested expressions.
We will use an enum type for different expression variants.
Note how we use Expr inside a Square variant.
This way we can represent both simple expressions (like 5 sqr) and something very complex (like 5 sqr sqr sqr or 3 2 + sqr).
enum Expr {
Number(i64),
Square(Box<Expr>),
// ...
}
// Here's how a `Square` variant can be created:
let four = Expr::Square(Box::new(Expr::Number(2)));Here’s a bit of code to get you started
pub enum Expr {}
pub enum ParseError {}
pub fn parse(input: &str) -> Result<Expr, ParseError> {
let mut stack: Vec<Expr> = Vec::new();
for word in input.split_ascii_whitespace() {
};
assert_eq!(stack.len(), 1);
let res = stack.pop().unwrap();
Ok(res)
}
pub enum EvalError {}
pub fn eval(expr: &Expr) -> Result<i64, EvalError> {
todo!()
}
#[cfg(test)]
mod tests {
use super::*;
#[test]
fn numbers() {
let input = "42";
let expr = parse(input).unwrap();
let value = eval(&expr).unwrap();
assert_eq!(value, 42);
}
// #[test]
// fn smoke_test() {
// let input = "3 sqr 4 sqr + 5 sqr -";
// let expr = parse(input).unwrap();
// let value = eval(&expr).unwrap();
// assert_eq!(value, 0);
// }
}Tip: When working on this exercise it’s often easier to add support for one operation at a time.
- Write a new test for an operation
- Add support for parsing the new kind of expression
- Add support for this kind of operation to
evalfunction
This way your code will be in a working state regularly, and iterating on it will be easier.
Tip: the starting code is not untouchable!
You can rewrite bits of it as you see fit.
For example, the assertion in the parse function can go in a way of your tests.
Feel free to comment it out, or better yet refactor the bit at the end to get rid of it and the unwrap call.
Stretch goals
- Handle overflow and underflow errors in
evalfunction (checked_addand similar methods can be very useful here). - Add support for unary minus
-operator. - Hard: change
parsefunction to support infix notation, operator precedence, and parentheses.
Help
Recursive data structures in Rust
If you try to make a
What does
Box mean in the Expr type?
enum type that uses itself as a field in one of its variants, then the type will potentially have an infinite size.
And if you would try to make a local variable of that type, the compiler wouldn’t know how big the stack frame for that function would have to be.
To avoid this we introduce an indirection via a Box wrapper.
It forces the wrapped portion of the type to be heap-allocated, and the size of Box itself becomes predictable.Box is not the only type you can use for this purpose.
Rc and Arc are other examples of these smart pointer types.
And in addition, Vec from standard library holds all its items on a heap, too.
Parsing postfix notation text
We offer a rough scaffold for the When we encounter an operator we pop one or two expressions from the stack, wrap them into a new expression, and then push the it back to the At the end, if the original string was well-formed we should end up with just a single item in the To parse numbers you can use the
What's the idea behind
stack variable?
parse function in the starter code.
As we split the input around spaces we will get either a number or an operator at a time.
We will use stack variable to store temporary sub-expressions.stack.
When we encounter a number we simply wrap it into Expr::Number(...) and push it.stack representing the whole expression.parse() method on string slices.
This method can produce values of many different types, and you can use turbofish syntax to give the compiler a hint about what kind of value you expect:let value = "12".parse::<i64>()?;
Dealing with Option and Result types
In the In general, unless there’s some way you can recover from an error in your function you should prefer Thankfully, Likewise, In addition, you can always
Should you
unwrap()?
parse function there are many instances where you either get an Option or an Result with an error that is different from ParseError.
While calling unwrap() in these cases can be tempting there are better options.? operator to bail out of it when things go wrong.
Thus, when getting an Option or a Result your first though should be: “I want to use ?. How do I get there?”Result has a convenient map_err method that can convert the error you get into an error type that you need:file.read_to_string(&mut buffer).map_err(|io_error| MyError::IoVariant)?;Option has a helpful ok_or method to convert to Result type that you can then use ? on.100_u8.checked_add(200_u8).ok_or(MyError::ByteOverflow)?;Option and Result have many other useful methods, and given that these types show up in Rust code all the time learning their API will help you writing more terse and idiomatic code.
You can read more about them in Item 3 of Effective Rust book.match / let else / if let on your Options and Results in tricky situations.
Testing error cases
While the use of panicking functions like
Use
unwrap_err() method
unwrap in production code is often frowned upon they are popular for tests.
Similar to how you can use unwrap to get a value out of Ok variant of a Result you can use unwrap_err to get a value out of Err.
Here’s an example:#[test]
fn no_a_number() {
let input = "X";
let error = parse(input).unwrap_err();
assert_eq!(error, ParseError::NotANumber);
}
Make your types testable
Rust’s testing macro
Use
derive for your types
assert_eq! compares the two arguments using == operator and if the values do not match it prints them in Debug mode to show you the difference between them.
Thus, to use it with your types like Expr the types have to be comparable and printable, i.e. implement Debug and PartialEq traits.
Thankfully, both traits can usually be derived automatically like so:#[derive(Debug, PartialEq)]
pub enum Expr {
// ...
}
Type conversions
The
&i64 to i64
eval function takes &Expr type as an argument and when you use it in match you will get &i64 instead of i64.
You can use a dereferencing operator * to convert a reference to a number to a number itself:// expr: &Expr
match expr {
// n: &i64
Expr::Number(n) => {
let x: i64 = *n;
}
}
Rust will make this conversion automatically, you don’t have to do anything!
To learn more about how it works read about
&Box<Expr> to &Expr
Deref coercion in The Rust Book.
Similar to
Box<Expr> to Expr
&i64 to i64 you can use a dereferencing operator:let boxed_expression: Box<Expr> = Box::new(Expr::Number(1));
let expr: Expr = *boxed_expression;
Step by step solution
Click to see the steps.
Step 1: Make a new library
cargo new --lib calc
Paste the starting code into lib.rs.
Add #[derive(Debug, PartialEq)] for Expr and error types to fix compilation errors in the test.
Step 2: Add support for numbers
Let’s start with parse function.
Inside a for loop we’ll be matching word variable against different operators.
If none of the operators match we will assume that we encounter a number.
So, number parsing will be in the default branch of our match expression:
// inside `parse`
for word in input.split_ascii_whitespace() {
match word {
"+" => todo!("add support for different operators"),
_ => {
let number = word
.parse::<i64>()
.map_err(|_| ParseError::NotANumber(word.to_string()))?;
let expr = Expr::Number(number);
stack.push(expr);
}
}
}Tip: You can use Rust Analyzer to populate enum types.
When you type ParseError::NotANumber(word.to_string()) put the cursor over NotANumber and use Generate Variant quick action.
You can do it again after typing Expr::Number.
Now, let’s work on eval function.
After you type match expr in the body you once again can use a quick action to generate a missing match arm for Number variant.
// in `eval`
match expr {
Expr::Number(n) => Ok(*n),
}You can now run the number test that we provide.
You can also write an error text for ParseError::NotANumber:
// in `tests` module:
#[test]
fn not_a_number() {
let input = "X";
let error = parse(input).unwrap_err();
assert_eq!(error, ParseError::NotANumber("X".to_string()));
}Step 3: Add support for addition
You can start with any operator of your choosing. Some of them may be trickier than others:
sqrtakes only one argument-and/take the order of the operands in account/can produce an error during evaluation
So, depending on what operator we will implement first our work can be easier (sqr) or harder (/).
Addition seems like a good starting place.
parse:
match word {
"+" => {
let a = stack.pop().ok_or(ParseError::MissingOperand)?;
let b = stack.pop().ok_or(ParseError::MissingOperand)?;
let a = Box::new(a);
let b = Box::new(b);
let expr = Expr::Add(a, b);
stack.push(expr);
}
_ => {
// number parsing code
}
}Once again: use Generate Variant for the new kind of expression.
eval:
match expr {
Expr::Number(n) => Ok(*n),
Expr::Add(a, b) => {
let a = eval(a)?;
let b = eval(b)?;
Ok(a + b)
}
}and tests:
#[test]
fn add() {
let input = "40 2 +";
let expr = parse(input).unwrap();
let value = eval(&expr).unwrap();
assert_eq!(value, 42);
}Step 4: Add support for squaring a number
You can probably notice that both parse and eval functions open opportunities for a refactoring.
Before doing that we should probably explore the variant of expression with the largest potential of being different.
sqr operator will produce code of a different shape due to it requiring only a single operand.
In real world situations it is sometimes hard to predict how different requirements will shape the resulting code.
However, making an attempt at a prediction like this can help you with avoiding refactoring prematurely and having to rollback massive changes later.
parse:
match word {
"+" => {
// ...
}
"sqr" => {
let a = stack.pop().ok_or(ParseError::MissingOperand)?;
let a = Box::new(a);
let expr = Expr::Square(a);
stack.push(expr);
}
_ => {
// ...
}
}eval:
match expr {
// ...
Expr::Square(a) => {
let a = eval(a)?;
Ok(a.pow(2))
}
}Test:
#[test]
fn square() {
let input = "5 sqr";
let expr = parse(input).unwrap();
let value = eval(&expr).unwrap();
assert_eq!(value, 25);
}Step 5: Refactoring
parse function
Some observations:
- Every branch of our big
matchstatement ends up producing an expression. - Every time we
popexpressions from the stack we have to box them.
So, here’s a plan:
- Let’s make
matchproduce an expression:let expr = match word { ... }; - Let’s change our
stackvariable to storeBoxed expressions
pub fn parse(input: &str) -> Result<Expr, ParseError> {
let mut stack: Vec<Box<Expr>> = Vec::new();
for word in input.split_ascii_whitespace() {
let expr = match word {
"+" => {
let a = stack.pop().ok_or(ParseError::MissingOperand)?;
let b = stack.pop().ok_or(ParseError::MissingOperand)?;
Expr::Add(a, b)
}
"sqr" => {
let a = stack.pop().ok_or(ParseError::MissingOperand)?;
Expr::Square(a)
}
_ => {
let number = word
.parse::<i64>()
.map_err(|_| ParseError::NotANumber(word.to_string()))?;
Expr::Number(number)
}
};
stack.push(Box::new(expr));
}
assert_eq!(stack.len(), 1);
let res = stack.pop().unwrap();
Ok(*res)
}Note that we have to adjust the type from Box<Expr> to Expr at the end.
While we are at it let’s rewrite the end portion of the function to get rid of an assertion and an unwrap:
for word in input.split_ascii_whitespace() {
// ...
}
match stack.pop() {
Some(expr) if stack.is_empty() => Ok(*expr),
Some(_) => Err(ParseError::TooManyOperands),
None => Err(ParseError::EmptyInput),
}Let’s test our new error conditions:
#[test]
fn too_many_operands() {
let input = "42 42 42 +";
let error = parse(input).unwrap_err();
assert_eq!(error, ParseError::TooManyOperands);
}
#[test]
fn empty_input() {
let input = " ";
let error = parse(input).unwrap_err();
assert_eq!(error, ParseError::EmptyInput);
}eval function
So far every branch of the match produces an number that we later wrap into Ok.
pub fn eval(expr: &Expr) -> Result<i64, EvalError> {
let value = match expr {
Expr::Number(n) => *n,
Expr::Add(a, b) => eval(a)? + eval(b)?,
Expr::Square(a) => eval(a)?.pow(2),
};
Ok(value)
}Step 6: Subtraction
In parse function all subsequent operators will require two stack.pop() calls.
We may as well combine different operators together and use unreachable! macro for the second match:
match word {
"+" | "-" => {
let a = stack.pop().ok_or(ParseError::MissingOperand)?;
let b = stack.pop().ok_or(ParseError::MissingOperand)?;
match word {
"+" => Expr::Add(a, b),
"-" => Expr::Sub(a, b),
_ => unreachable!(),
}
}
// ...
}// in `eval`
match expr {
// ...
Expr::Add(a, b) => eval(a)? + eval(b)?,
Expr::Sub(a, b) => eval(a)? - eval(b)?,
// ...
};#[test]
fn sub() {
let input = "42 2 -";
let expr = parse(input).unwrap();
let value = eval(&expr).unwrap();
assert_eq!(value, 40);
}Adding a test will reveal that we have a bug with the order of operands.
---- tests::sub stdout ----
thread 'tests::sub' panicked at calculator/src/lib.rs:96:9:
assertion `left == right` failed
left: -40
right: 40
It’s up to you to decide where to mitigate the issue.
You can do it in eval or in parse.
We will do it in parse right away by popping b from the stack first:
match word {
"+" | "-" => {
let b = stack.pop().ok_or(ParseError::MissingOperand)?;
let a = stack.pop().ok_or(ParseError::MissingOperand)?;
// ...
}
// ...
}Step 7: Multiplication
The changes will completely match code for addition and subtraction.
Here’s a test for you to check your work:
#[test]
fn mul() {
let input = "21 2 *";
let expr = parse(input).unwrap();
let value = eval(&expr).unwrap();
assert_eq!(value, 42);
}Step 8: Division
Division will require more code in the eval function to check if the divisor is Zero.
You can perform the check inside the Expr::Div arm or move it to its own arm and use a guard expression like this:
match expr {
// ...
Expr::Div(_, divisor) if eval(&divisor)? == 0 => {
return Err(EvalError::DivisionByZero)
}
Expr::Div(a, b) => eval(a)? / eval(b)?,
// ...
}Let’s test our code:
#[test]
fn div() {
let input = "84 2 /";
let expr = parse(input).unwrap();
let value = eval(&expr).unwrap();
assert_eq!(value, 42);
}
#[test]
fn divide_by_zero() {
let input = "42 0 /";
let expr = parse(input).unwrap();
let error = eval(&expr).unwrap_err();
assert_eq!(error, EvalError::DivisionByZero);
}Finally, you can uncomment the smoke test and see how our library works for complex expressions.
Iterators
In this exercise, you will learn to manipulate and chain iterators. Iterators are a functional way to write loops and control flow logic.
After completing this exercise you are able to
- chain Rust iterator adapters
- use closures in iterator chains
- collect a result to different containers
Prerequisites
For completing this exercise you need to have
- knowledge of control flow
- how to write basic functions
- know basic Rust types
Task
Calculate the sum of all odd numbers in the following string using an iterator chain:
//ignore everything that is not a number
1
2
3
4
five
6
7
∞
9
X
11
We have a template project for this exercise. You can replace the todo! item in the template with reader.lines() and continue “chaining” the iterators until you’ve calculated the desired result. Note that the template will only be able to find numbers.txt if you run cargo run from the exercise-templates/iterators directory. Running the binary from elsewhere in the workspace will give a File not found error.
If you need it, we have provided a complete solution for this exercise.
Knowledge
Iterators and iterator chains
Iterators are a way to chain function calls instead of writing elaborate for loops.
This lets us have a type safe way of composing control flow together by calling the right functions.
For example, to double every number given by a vector, you could write a for loop:
let v = [10, 20, 30];
let mut xs = [0, 0, 0];
for idx in 0..=v.len() {
xs[idx] = 2 * v[idx];
}In this case, the idea of running a procedure like 2 * v[idx] whilst indexing over the entire collection is called a map. Using iterator chains you could instead write something like:
let v = [10, 20, 30];
let xs: Vec<_> = v
.iter()
.map(|elem| elem * 2)
.collect();No win for brevity, but it has several benefits:
- Changing the underlying logic is more robust
- Less indexing operations means you will fight the borrow checker less in the long run
- You can parallelize your code with minimal changes using rayon.
The first point is not in vain - the original snippet has a bug in the upper bound, since 0..=v.len() is inclusive! It should have been 0..v.len().
Finally, don’t forget that iterators are lazy functions - they only carry out computation when a consuming adapter like .collect() is called, not when the .map() is added to the chain.
Iterator chains workflow advice
Start every iterator call on a new line, so that you can see closure arguments and type hints for the iterator at the end of the line clearly.
When in doubt, write .map(|x| x) first to see what item types you get and decide on what iterator methods to use and what to do inside a closure based on that.
Turbofish syntax ::<>
Iterators sometimes struggle to figure out the types of all intermediate steps and need assistance.
let numbers: Vec<_> = ["1", "2", "3"]
.iter()
.map(|s| s.parse::<i32>().unwrap())
// a turbofish in the `parse` call above
// helps a compiler determine the type of `n` below
.map(|n| n + 1)
.collect();This ::<SomeType> syntax is called the turbofish operator, and it disambiguates calling the same method but getting back different return types, like .parse::<i32>() and .parse::<f64>() (try it!)
Dealing with .unwrap()s in iterator chains
Intermediate steps in iterator chains often produce Result or Option.
You may be tempted to use unwrap / expect to get the inner values. However, there are usually better ways that don’t require a potential panic.
Concretely, the following snippet:
let numbers: Vec<_> = ["1", "2", "3"]
.iter()
.map(|s| s.parse::<i32>())
.filter(|r| r.is_ok())
.map(|r| r.expect("all `Result`s are Ok here"))
.collect();can be replaced with a judicious use of .filter_map():
let numbers: Vec<_> = ["1", "2", "3"]
.iter()
.filter_map(|s| s.parse::<i32>().ok())
.collect();You will relive similar experiences when learning Rust without knowing the right tools from the standard library that let you convert Result into what you actually need.
We make a special emphasis on avoiding “.unwrap() now, refactor later” because later usually never comes.
Dereferences
Rust will often admonish you to add an extra dereference (*) by comparing the expected input and actual types, and you’ll need to write something like .map(|elem| *elem * 2) to correct your code. A tell tale sign of this is that the expected types and the actual type differ by the number of &’s present.
Remember you can select and hover over each expression and rust-analyzer will display its type if you want a more detailed look inside.
Destructuring in closures
Some iterator chains involve Item being a tuple. If so, it may be useful to destructure the tuple when writing the closure:
let x = [10, 20, 30];
let y = [1, 2, 3];
let z = x
.iter()
.zip(y.iter())
.map(|(a, b)| a * b)
.sum::<i32>();Here, the .map(|(a, b)| a + b) is iterating over [(10, 1), (20, 2), (30, 3)] and calling the left argument a and the right argument b, in each iteration.
Step-by-Step-Solution
In general, we also recommend using the Rust documentation to get unstuck. In particular, look for the examples in the Iterator page of the standard library for this exercise.
If you ever feel completely stuck or that you haven’t understood something, please hail the trainers quickly.
Step 1: New Project
Copy or recreate the exercise-templates/iterators template to get started.
Step 2: Read the string data
Read the contents of iterators/numbers.txt line by line, and collect it all into one big String. Note that the lines() iterator gives us Result<String, std::io::Error> so let’s only keep the lines that we were able to successfully read from disk.
Solution
use std::io::{BufRead, BufReader};
use std::fs::File;
use std::error::Error;
fn main() -> Result<(), Box<dyn Error>> {
use crate::*;
let f = File::open("numbers.txt")?;
let reader = BufReader::new(f);
let file_lines = reader.lines()
.filter_map(|line| line.ok())
.collect::<String>();
println!("{:?}", file_lines);
Ok(())
}Step 3: Skip the non-numeric lines
Now let’s check that each line is a a valid number, using .parse(). We’ll be collecting everything into a Vec<i32>.
Note that you may or may not need type annotations on .parse() depending on if you add them on the binding or not - that is, let numeric_lines: Vec<i32> = ... will give Rust type information to deduce the iterator’s type correctly.
Solution
If the use of filter_map here is unfamiliar, go back and reread the Dealing with .unwrap()s in iterator chains section.
use std::io::{BufRead, BufReader};
use std::fs::File;
use std::error::Error;
fn main() -> Result<(), Box<dyn Error>> {
use crate::*;
let f = File::open("numbers.txt")?;
let reader = BufReader::new(f);
let numeric_lines: Vec<i32> = reader.lines()
.filter_map(|line| line.ok())
.filter_map(|line| line.parse::<i32>().ok())
.collect::<Vec<i32>>();
println!("{:?}", numeric_lines);
Ok(())
}Step 4: Keep the odd numbers
Use a .filter() with an appropriate closure to keep only the odd numbers.
Solution
use std::io::{BufRead, BufReader};
use std::fs::File;
use std::error::Error;
fn main() -> Result<(), Box<dyn Error>> {
use crate::*;
let f = File::open("numbers.txt")?;
let reader = BufReader::new(f);
let odd_numbers = reader.lines()
.filter_map(|line| line.ok())
.filter_map(|line| line.parse::<i32>().ok())
.filter(|num| num % 2 != 0)
.collect::<Vec<i32>>();
println!("{:?}", odd_numbers);
Ok(())
}Step 5: Add the odd numbers
Take the odd numbers and sum() them.
Solution
use std::io::{BufRead, BufReader};
use std::fs::File;
use std::error::Error;
fn main() -> Result<(), Box<dyn Error>> {
use crate::*;
let f = File::open("numbers.txt")?;
let reader = BufReader::new(f);
let result = reader.lines()
.filter_map(|line| line.ok())
.filter_map(|line| line.parse::<i32>().ok())
.filter(|num| num % 2 != 0)
.sum::<i32>();
println!("{:?}", result);
Ok(())
}SimpleDB Exercise
In this exercise, we will implement a toy protocol parser for a simple protocol for databank queries. We call it simpleDB. The protocol has two commands, one of them can be sent with a payload of additional data. Your parser parses the incoming data strings, makes sure the commands are formatted correctly and returns errors for the different ways the formatting can go wrong.
After completing this exercise you will be able to
-
write a simple Rust library from scratch
-
interact with borrowed and owned memory, especially how to take ownership
-
handle complex cases using the
matchandif letsyntax -
create a safe protocol parser in Rust manually
Prerequisites
-
basic pattern matching with
match -
control flow with if/else
-
familiarity with
Result<T, E>,Option<T>
Tasks
- Create a library project called
simple-db. - Implement appropriate data structures for
CommandandError. - Read the documentation for
str, especiallystrip_prefix()andstrip_suffix(). Pay attention to their return type. - Implement the following function so that it implements the protocol specifications to parse the messages. Use the provided tests to help you with the case handling.
pub fn parse(input: &str) -> Result<Command, Error> {
todo!()
}The Step-by-Step-Solution contains steps 4a-c that explain a possible way to handle the cases in detail.
Optional Tasks:
- Run
clippyon your codebase. - Run
rustfmton your codebase.
If you need it, we have provided solutions for every step for this exercise.
Protocol Specification
The protocol has two commands that are sent as messages in the following form:
-
PUBLISH <payload>\n -
RETRIEVE\n
With the additional properties:
-
The payload cannot contain newlines.
-
A missing newline at the end of the command is an error.
-
A newline other than at the end of the command is an error.
-
Sending a
PUBLISHwith an empty payload is allowed. In this case, the commandPUBLISH \nwill publish an empty payload.
Note: depending on the order in which the rules are implemented, you may obtain different behaviours.
Issues with the format (or other properties) of the messages are handled with the following error codes:
-
UnexpectedNewline(a newline not at the end of the line) -
IncompleteMessage(no newline at the end) -
EmptyMessage(empty string instead of a command) -
UnknownCommand(string is not empty, but neitherPUBLISHnorRECEIVE) -
UnexpectedPayload(message contains a payload, when it should not) -
MissingPayload(message is missing a payload)
Testing
Below are the tests your protocol parser needs to pass. You can copy them to the bottom of your lib.rs.
#[cfg(test)]
mod tests {
use super::*;
// Tests placement of \n
#[test]
fn test_missing_nl() {
let line = "RETRIEVE";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::IncompleteMessage);
assert_eq!(result, expected);
}
#[test]
fn test_trailing_data() {
let line = "PUBLISH The message\n is wrong \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedNewline);
assert_eq!(result, expected);
}
#[test]
fn test_empty_string() {
let line = "";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::IncompleteMessage);
assert_eq!(result, expected);
}
// Tests for empty messages and unknown commands
#[test]
fn test_only_nl() {
let line = "\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::EmptyMessage);
assert_eq!(result, expected);
}
#[test]
fn test_unknown_command() {
let line = "SERVE \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnknownCommand);
assert_eq!(result, expected);
}
// Tests correct formatting of RETRIEVE command
#[test]
fn test_retrieve_w_whitespace() {
let line = "RETRIEVE \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedPayload);
assert_eq!(result, expected);
}
#[test]
fn test_retrieve_payload() {
let line = "RETRIEVE this has a payload\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedPayload);
assert_eq!(result, expected);
}
#[test]
fn test_retrieve() {
let line = "RETRIEVE\n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Retrieve);
assert_eq!(result, expected);
}
// Tests correct formatting of PUBLISH command
#[test]
fn test_publish() {
let line = "PUBLISH TestMessage\n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Publish("TestMessage".into()));
assert_eq!(result, expected);
}
#[test]
fn test_empty_publish() {
let line = "PUBLISH \n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Publish("".into()));
assert_eq!(result, expected);
}
#[test]
fn test_missing_payload() {
let line = "PUBLISH\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::MissingPayload);
assert_eq!(result, expected);
}
}Knowledge
This section explains concepts necessary to solve the simpleDB exercise.
We also recommend using the official Rust documentation to figure out unfamiliar concepts. If you ever feel completely stuck, or if you haven’t understood something specific, please hail the trainers quickly.
Derives
#[derive(PartialEq, Eq)]
This enables comparison between 2 instances of the type, by comparing every field/variant. This enables the assert_eq! macro, which relies on equality being defined. Eq for total equality isn’t strictly necessary for this example, but it is good practice to derive it if it applies.
#[derive(Debug)]
This enables the automatic generation of a debug formatting function for the type. The assert_eq! macro requires this for testing.
Control flow and pattern matching, returning values
This exercise involves handling a number of cases. You are already familiar with if/else and a basic form of match. Here, we’ll introduce you to if let, and let else:
if let Some(message) = message.strip_prefix("PREFIX:") {
// Executes if the above pattern is a match.
}
// The variable `message` is NOT available here.
let Some(message) = message.strip_prefix("PREFIX:") else {
// Executes if the above pattern is NOT a match.
// Must have an early return in this block.
};
// The variable `message` is still available here.When to use what?
if let is like a pattern-matching match block with only one arm. So, if your match only has one arm of interest, consider an if let or let else instead (depending on whether the pattern match means success, or the pattern match means there’s an error).
match can be used to handle more fine grained and complex pattern matching, especially when there are several, equally ranked possibilities. The match arms may have to include a catch all _ => arm, for every possible case that is not explicitly spelled out. The order of the match arms matter: The catch all branch needs to be last, otherwise, it catches all…
Returning Values from branches and match arms
All match arms always need to produce a value the same type (or they diverge with a return statement).
Step-by-Step Solution
Step 1: Creating a library project with cargo
Create a new Cargo project, check the build and the test setup:
Solution
cargo new --lib simple-db
cd simple-db
cargo build
cargo test
Step 2: Define appropriate data structures
Define two enums, one is called Command and one is called Error. Command has 2 variants for the two possible commands. Publish carries data (the message), Retrieve does not. Error is just a list of error kinds. Use #[derive(Eq,PartialEq,Debug)] for both enums.
Solution
#[derive(Eq, PartialEq, Debug)]
pub enum Command {
Publish(String),
Retrieve,
}
#[derive(Eq, PartialEq, Debug)]
pub enum Error {
UnexpectedNewline,
IncompleteMessage,
EmptyMessage,
UnknownCommand,
UnexpectedPayload,
MissingPayload,
}
// Tests go here!Step 3: Read the documentation for str, especially strip_prefix(), strip_suffix()
tl;dr:
message.strip_prefix("FOO ")returnsSome(remainder)if the string slicemessagestarts with"FOO ", otherwise you getNonemessage.strip_suffix('\n')returnsSome(remainder)if the string slicemessageends with'\n', otherwise you getNone.
Note that both functions will take either a string slice, or a character, or will actually even take a function that returns a boolean to tell you whether a character matches or not (we won’t use that though).
The proposed logic
-
Check if the string ends with the char
'\n'- if so, keep the rest of it, otherwise return an error. -
Check if the remainder still contains a
'\n'- if so, return an error. -
Check if the remainder is empty - if so, return an error.
-
Check if the remainder begins with
"PUBLISH "- if so, returnOk(Command::Publish(...))with the payload upconverted to aString -
Check if the remainder is
"PUBLISH"- if so, return an error because the mandatory payload is missing. -
Check if the remainder begins with
"RETRIEVE "- if so, return an error because that command should not have anything after it. -
Check if the remainder is
"RETRIEVE"- if so, returnOk(Command::Retrieve) -
Otherwise, return an unknown command error.
Step 4: Implement fn parse()
Step 4a: Sorting out wrongly placed and absent newlines
Missing, wrongly placed and more than one \n are errors that occur independent of other errors so it makes sense to handle these cases first. Check the string has a newline at the end with strip_suffix. If not, that’s an Error::IncompleteMessage. We can assume the pattern will match (that strip_suffix will return Some(...), which is our so-called sunny day scenario) so a let - else makes most sense here - although a match will also work.
Now look for newlines within the remainder using the contains() method and if you find any, that’s an error.
Tip: Introduce a generic variant Command::Command that temporarily stands for a valid command.
Solution
pub fn parse(input: &str) -> Result<Command, Error> {
let Some(message) = input.strip_suffix('\n') else {
return Err(Error::IncompleteMessage);
};
if message.contains('\n') {
return Err(Error::UnexpectedNewline);
}
Ok(Command::Command)Step 4b: Looking for “RETRIEVE”
In 4a, we produce a Ok(Command::Command) if the newlines all check out. Now we want to look for a RETRIEVE command.
If the string is empty, that’s an error. If the string is exactly "RETRIEVE", that’s our command. Otherwise the string starts with "RETRIEVE ", then that’s an UnexpectedPayload error.
Solution
let Some(message) = input.strip_suffix('\n') else {
return Err(Error::IncompleteMessage);
};
if message.contains('\n') {
return Err(Error::UnexpectedNewline);
}
if message == "RETRIEVE" {
Ok(Command::Retrieve)
} else if let Some(_payload) = message.strip_prefix("RETRIEVE ") {
Err(Error::UnexpectedPayload)
} else if message == "" {
Err(Error::EmptyMessage)
} else {
Err(Error::UnknownCommand)
}Step 4c: Looking for “PUBLISH”
Now we want to see if the message starts with "PUBLISH ", and if so, return a Command::Publish containing the payload, but converted to a heap-allocated String so that ownership is passed back to the caller. If not, and the message is equal to "PUBLISH", then that’s a MissingPayload error.
Solution
let Some(message) = input.strip_suffix('\n') else {
return Err(Error::IncompleteMessage);
};
if message.contains('\n') {
return Err(Error::UnexpectedNewline);
}
if let Some(payload) = message.strip_prefix("PUBLISH ") {
Ok(Command::Publish(String::from(payload)))
} else if message == "PUBLISH" {
Err(Error::MissingPayload)
} else if message == "RETRIEVE" {
Ok(Command::Retrieve)
} else if let Some(_payload) = message.strip_prefix("RETRIEVE ") {
Err(Error::UnexpectedPayload)
} else if message == "" {
Err(Error::EmptyMessage)
} else {
Err(Error::UnknownCommand)
}Full source code
If all else fails, feel free to copy this solution to play around with it.
Solution
#![allow(unused)]
fn main() {
#[derive(Eq, PartialEq, Debug)]
pub enum Command {
Publish(String),
Retrieve,
}
#[derive(Eq, PartialEq, Debug)]
pub enum Error {
UnexpectedNewline,
IncompleteMessage,
EmptyMessage,
UnknownCommand,
UnexpectedPayload,
MissingPayload,
}
pub fn parse(input: &str) -> Result<Command, Error> {
let Some(message) = input.strip_suffix('\n') else {
return Err(Error::IncompleteMessage);
};
if message.contains('\n') {
return Err(Error::UnexpectedNewline);
}
if let Some(payload) = message.strip_prefix("PUBLISH ") {
Ok(Command::Publish(String::from(payload)))
} else if message == "PUBLISH" {
Err(Error::MissingPayload)
} else if message == "RETRIEVE" {
Ok(Command::Retrieve)
} else if let Some(_payload) = message.strip_prefix("RETRIEVE ") {
Err(Error::UnexpectedPayload)
} else if message == "" {
Err(Error::EmptyMessage)
} else {
Err(Error::UnknownCommand)
}
}
#[cfg(test)]
mod tests {
use super::*;
// Tests placement of \n
#[test]
fn test_missing_nl() {
let line = "RETRIEVE";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::IncompleteMessage);
assert_eq!(result, expected);
}
#[test]
fn test_trailing_data() {
let line = "PUBLISH The message\n is wrong \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedNewline);
assert_eq!(result, expected);
}
#[test]
fn test_empty_string() {
let line = "";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::IncompleteMessage);
assert_eq!(result, expected);
}
// Tests for empty messages and unknown commands
#[test]
fn test_only_nl() {
let line = "\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::EmptyMessage);
assert_eq!(result, expected);
}
#[test]
fn test_unknown_command() {
let line = "SERVE \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnknownCommand);
assert_eq!(result, expected);
}
// Tests correct formatting of RETRIEVE command
#[test]
fn test_retrieve_w_whitespace() {
let line = "RETRIEVE \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedPayload);
assert_eq!(result, expected);
}
#[test]
fn test_retrieve_payload() {
let line = "RETRIEVE this has a payload\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedPayload);
assert_eq!(result, expected);
}
#[test]
fn test_retrieve() {
let line = "RETRIEVE\n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Retrieve);
assert_eq!(result, expected);
}
// Tests correct formatting of PUBLISH command
#[test]
fn test_publish() {
let line = "PUBLISH TestMessage\n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Publish("TestMessage".into()));
assert_eq!(result, expected);
}
#[test]
fn test_empty_publish() {
let line = "PUBLISH \n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Publish("".into()));
assert_eq!(result, expected);
}
#[test]
fn test_missing_payload() {
let line = "PUBLISH\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::MissingPayload);
assert_eq!(result, expected);
}
}
}Green and Yellow Game
In this assignment we will implement the game “Green and Yellow”. It’s like Wordle, but with numerical digits instead of letters. But for legal reasons it’s also entirely unlike Wordle, and entirely unlike the 1970’s board-game “Mastermind”.
After completing this exercise you will be able to
- Work with rust slices and vectors
- Accept input from stdin
- Iterate through arrays and slices
- Generate random numbers
Prerequisites
To complete this exercise you need to have:
- basic Rust programming skills
- the Rust Syntax Cheat Sheet
Task
- Create a new binary crate called
green-yellow - Copy all the test cases into into your
main.rs - Define a function
fn calc_green_and_yellow(guess: &[u8; 4], secret: &[u8; 4]) -> Stringthat implements the following rules:- Return a string containing four Unicode characters
- For every item in guess, if
guess[i] == secret[i], then positioniin the output String should be a green block (🟩) - Then, for every item in guess, if
guess[i]is insecretsomewhere, and hasn’t already been matched, then positioniin the output String should be a yellow block (🟨) - If any of the guesses do not appear in the secret, then that position in the output String should be a grey block (
⬜)
- Ensure all the test cases pass!
- Write a main function that implements the following:
- Generate 4 random digits - our ‘secret’
- Go into a loop
- Read a string from Standard In and trim the whitespace off it
- Parse that string into a guess, containing four digits (give an error if the user makes a mistake)
- Run the calculation routine above and print the coloured blocks
- Exit if all the blocks are green
- Play the game
If you need it, we have provided a complete solution for this exercise.
Your test cases are:
#![allow(unused)]
fn main() {
#[test]
fn all_wrong() {
assert_eq!(
&calc_green_and_yellow(&[5, 6, 7, 8], &[1, 2, 3, 4]),
"⬜⬜⬜⬜"
);
}
#[test]
fn all_green() {
assert_eq!(
&calc_green_and_yellow(&[1, 2, 3, 4], &[1, 2, 3, 4]),
"🟩🟩🟩🟩"
);
}
#[test]
fn one_wrong() {
assert_eq!(
&calc_green_and_yellow(&[1, 2, 3, 5], &[1, 2, 3, 4]),
"🟩🟩🟩⬜"
);
}
#[test]
fn all_yellow() {
assert_eq!(
&calc_green_and_yellow(&[4, 3, 2, 1], &[1, 2, 3, 4]),
"🟨🟨🟨🟨"
);
}
#[test]
fn one_wrong_but_duplicate() {
assert_eq!(
&calc_green_and_yellow(&[1, 2, 3, 1], &[1, 2, 3, 4]),
"🟩🟩🟩⬜"
);
}
#[test]
fn one_right_others_duplicate() {
assert_eq!(
&calc_green_and_yellow(&[1, 1, 1, 1], &[1, 2, 3, 4]),
"🟩⬜⬜⬜"
);
}
#[test]
fn two_right_two_swapped() {
assert_eq!(
&calc_green_and_yellow(&[1, 2, 2, 2], &[2, 2, 2, 1]),
"🟨🟩🟩🟨"
);
}
#[test]
fn two_wrong_two_swapped() {
assert_eq!(
&calc_green_and_yellow(&[1, 3, 3, 2], &[2, 2, 2, 1]),
"🟨⬜⬜🟨"
);
}
#[test]
fn a_bit_of_everything() {
assert_eq!(
&calc_green_and_yellow(&[1, 9, 4, 3], &[1, 2, 3, 4]),
"🟩⬜🟨🟨"
);
}
#[test]
fn two_in_guess_one_in_secret() {
assert_eq!(
&calc_green_and_yellow(&[1, 2, 3, 3], &[3, 9, 9, 9]),
"⬜⬜🟨⬜"
);
}
#[test]
fn four_in_guess_one_in_secret() {
assert_eq!(
&calc_green_and_yellow(&[1, 1, 1, 1], &[4, 3, 1, 2]),
"⬜⬜🟩⬜"
);
}
#[test]
fn one_in_guess_two_in_secret() {
assert_eq!(
&calc_green_and_yellow(&[1, 2, 3, 4], &[3, 3, 9, 9]),
"⬜⬜🟨⬜"
);
}
}Knowledge
Generating Random Numbers
There are no random number generators in the standard library - you have to use the rand crate.
You will need to change Cargo.toml to depend on the rand crate - we suggest version 0.8.
You need a random number generator (call rand::thread_rng()), and using that you can generate a number out of a given range with gen_range. See https://docs.rs/rand for more details.
Reading from the Console
You need to grab a standard input handle with std::io::stdin(). This implements the std::io::Write trait, so you can call read_to_string(&mut some_string) and get a line of text into your some_string: String variable.
Parsing Strings into Integers
Strings have a parse() method, which returns a Result, because of course the user may not have typed in a proper digit. The parse() function works out what you are trying to create based on context - so if you want a u8, try let x: u8 = my_str.parse().unwrap(). Or you can say let x = my_str.parse::<u8>().unwrap(). Of course, try to do something better than unwrap!
Step-by-Step-Solution
We also recommend using the official Rust documentation to figure out unfamiliar concepts. If you ever feel completely stuck, or if you haven’t understood something specific, please hail the trainers quickly.
Step 1: New Project
Create a new binary Cargo project, check the build and see if it runs.
Solution
cargo new green-yellow
cd green-yellow
cargo run
Step 2: Generate some squares
Get calc_green_and_yellow to just generate grey blocks. We put them in an Vec first, as that’s easier to index than a string.
Call the function from main() to avoid the warning about it being unused.
Solution
fn calc_green_and_yellow(_guess: &[u8; 4], _secret: &[u8; 4]) -> String {
let result = ["⬜"; 4];
result.join("")
}Step 3: Check for green squares
You need to go through every pair of items in the input arrays and check if they are the same. If so, set the output square to be green.
Solution
fn calc_green_and_yellow(guess: &[u8; 4], secret: &[u8; 4]) -> String {
let mut result = ["⬜"; 4];
for i in 0..guess.len() {
if guess[i] == secret[i] {
result[i] = "🟩";
}
}
result.join("")
}Step 4: Check for yellow squares
This gets a little more tricky.
We need to loop through every item in the guess array and compare it to every item in the secret array. But! We must make sure we ignore any values we already ‘used up’ when we produced the green squares.
Let’s do this by copying the input, so we can make it mutable, and mark off any values used in the green-square-loop by setting them to zero.
Solution
fn calc_green_and_yellow(guess: &[u8; 4], secret: &[u8; 4]) -> String {
let mut result = ["⬜"; 4];
let mut secret_handled = [false; 4];
for i in 0..guess.len() {
if guess[i] == secret[i] {
// that's a match
result[i] = "🟩";
// don't match this secret digit again
secret_handled[i] = true;
}
}
'guess: for g_idx in 0..guess.len() {
// only process guess digits we haven't already dealt with
if result[g_idx] == "🟩" {
continue;
}
for s_idx in 0..secret.len() {
// only process secret digits we haven't already dealt with
if secret_handled[s_idx] {
continue;
}Step 5: Get some random numbers
Add rand = "0.8" to your Cargo.toml, and make a random number generator with rand::thread_rng() (Random Number Generator). You will also have to use rand::Rng; to bring the trait into scope.
(A built-in random number generator is proposed for the Standard Library but is still nightly only as of October 2024).
Call your_rng.gen_range() in a loop.
Solution
// put a yellow block in for this guess
result[g_idx] = "🟨";
// never match this secret digit again
secret_handled[s_idx] = true;
// stop comparing this guessed digit to any other secret digits
continue 'guess;
}
}
}
Step 6: Make the game loop
We a loop to handle each guess the user makes.
For each guess we need to read from Standard Input (using std::io::stdin() and its read_line()) method.
You will need to trim and then split the input, then parse each piece into a digit.
- If the digit doesn’t parse,
continuethe loop. - If the digit parses but it out of range,
continuethe loop. - If you get the wrong number of digits,
continuethe loop. - If the guess matches the secret, then break out of the loop and congratulate the winner.
- Otherwise run the guess through our calculation function and print the squares.
Solution
}
fn main() {
let mut rng = rand::thread_rng();
let stdin = std::io::stdin();
let mut secret = [0u8; 4];
for digit in secret.iter_mut() {
*digit = rng.gen_range(1..=9);
}
println!("New game (secret is {:?}!", secret);
loop {
let mut line = String::new();
println!("Enter guess:");
stdin.read_line(&mut line).unwrap();
let mut guess = [0u8; 4];
let mut idx = 0;
for piece in line.trim().split(' ') {
let Ok(digit) = piece.parse::<u8>() else {
println!("{:?} wasn't a number", piece);
continue;
};
if digit < 1 || digit > 9 {
println!("{} is out of range", digit);
continue;
}
if idx >= guess.len() {
println!("Too many numbers, I only want {}", guess.len());
continue;
}
guess[idx] = digit;Shapes
In this exercise we’re going to define methods for a struct, define and implement a trait, and look into how to make structs and traits generic.
Learning Goals
You will learn how to:
- implement methods for a
struct - when to use
Self,self,&selfand&mut selfin methods - define a trait with required methods
- make a type generic over
T - how to constrain
T
Tasks
Part 1: Defining Methods for Types
You can find a complete solution
-
Make a new library project called
shapes -
Make two structs,
Circlewith fieldradiusandSquarewith fieldsideto use as types. Decide on appropriate types forradiusandside. -
Make an
implblock and implement the following methods for each type. Consider when to useself,&self,&mut selfandSelf.-
fn new(...) -> ...- creates an instance of the shape with a certain size (radius or side length).
-
fn area(...) -> ...- calculates the area of the shape.
-
fn scale(...)- changes the size of an instance of the shape.
-
fn destroy(...) -> ...- destroys the instance of a shape and returns the value of its field.
-
Part 2: Defining and Implementing a Trait
You can find a complete solution
- Define a Trait
HasAreawith a mandatory method:fn area(&self) -> f32. - Implement
HasAreaforSquareandCircle. You can defer to the existing method but may need to cast the return type. - Abstract over
CircleandSquareby defining an enumShapethat contains both as variants. - Implement
HasAreaforShape.
Part 3: Making Square generic over T
You can find a complete solution
We want to make Square and Circle generic over T, so we can use other numeric types and not just u32 and f32.
-
Add the generic type parameter
<T>toSquare. You can temporarily removeenum Shapeto make this easier. -
Import the
numcrate, version 0.4.0, to use thenum::Numtrait as bound for the generic type<T>. This assures thatTis a numeric type, and also makes some guarantees about operations that can be performed on<T>. -
Add a
whereclause on the methods ofSquare, as required, e.g.:where T: num::Num -
Depending on the operations performed in that function, you may need to add further trait bounds, such as
Copyandstd::ops::MulAssign. You can add them to thewhereclause with a+sign, likeT: num::Num + Copy. -
Add the generic type parameter
<T>toCircleand then appropriatewhereclauses. -
Re-introduce
Shapebut with the generic type parameter<T>, and then add appropriatewhereclauses.
Help
This section gives partial solutions to look at or refer to.
We also recommend using the official Rust documentation to figure out unfamiliar concepts. If you ever feel completely stuck, or if you haven’t understood something specific, please hail the trainers quickly.
Getting Started
Create a new library Cargo project, check the build and see if it runs:
$ cargo new --lib shapes
$ cd shapes
$ cargo run
Creating a Type
Each of your shape types (Square, Circle, etc.) will need some fields (or
properties) to identify its geometry. Use /// to add documentation to
each field.
/// Describes a human individual
struct Person {
/// How old this person is
age: u8
}Functions that take arguments: self, &self, &mut self
Does your function need to take ownership of the shape in order to calculate its area? Or is it sufficient to merely take a read-only look at the shape for a short period of time?
You can pass arguments by reference in Rust by making your function take x: &MyShape, and passing them with &my_shape.
You can also associate your function with a specific type by placing it inside a block like impl MyShape { ... }
impl Pentagon {
fn area(&self) -> u32 {
// calculate the area of the pentagon here...
}
}A Shape of many geometries
You can use an enum to provide a single type that can be any of your supported shapes. If we were working with fruit, we might say:
struct Banana { ... }
struct Apple { ... }
enum Fruit {
Banana(Banana),
Apple(Apple),
}If you wanted to count the pips in a piece of Fruit, you might just call to the num_pips() method on the appropriate constituent fruit. This might look like:
impl Fruit {
fn num_pips(&self) -> u8 {
match self {
Fruit::Apple(apple) => apple.num_pips(),
Fruit::Banana(banana) => banana.num_pips(),
}
}
}I need a π
The f32 type also has its own module in the standard library called std::f32. If you look at the docs, you will find a defined constant for π: std::f32::consts::PI.
I need a π, of type T
If you want to convert a Pi constant to some type T, you need a where bound like:
where T: num::Num + From<f32>This restricts T to values that can be converted from an f32 (or, types you can convert an f32 into). You can then call let my_pi: T = my_f32_pi.into(); to convert your f32 value into a T value.
Defining a Trait
A trait has a name, and lists function definitions that make guarantees about the name of a method, its arguments and return types.
#![allow(unused)]
fn main() {
pub trait Color {
fn red() -> u8;
}
}Adding generic Type parameters
#![allow(unused)]
fn main() {
pub struct Square<T> {
/// The length of one side of the square
side: T,
}
impl<T> Square<T> {
// ...
}
}TCP Echo Server
In this exercise, we will make a simple TCP “echo” server using APIs in Rust’s Standard Library.
Here’s how an interaction with it would look like from a client point of view. You connect to it using nc, for example:
nc localhost 7878
and type in one line of text. As soon as you hit enter, the server sends the line back but keeps the connection opened. You can type another line and get it back, and so on.
Here’s an example interaction with the server. Notice that after typing a single line the connection is not closed and we receive the line back. All inputs and outputs should be separated by new line characters (\n).
$ nc localhost 7878
hello
> hello
world
> world
(> denotes the text that is sent back to you)
After completing this exercise you are able to
-
open a TCP port and react to TCP clients connecting
-
use I/O traits to read/write from a TCP socket
-
use threads to support multiple connections
Tasks
- Create a new binary project
tcp-server - Implement a basic TCP server that listens for connections on a given port (you can use
127.0.0.1:7878or any other port that you like). - Implement a loop that would read data from a
TcpStreamone line at a time. We assume that lines are separated by a\ncharacter. - Add writing the received line back to the stream. Resolve potential borrow checker issues using standard library APIs.
- Use Rust’s
threadAPI to add support for multiple connections.
Here’s a bit of code to get you started:
use std::{io, net::{TcpListener, TcpStream}};
fn handle_client(mut stream: TcpStream) -> Result<(), io::Error> {
todo!("read stream line by line, write lines back to the stream");
// for line in stream {
// write line back to the to stream
// }
Ok(())
}
fn main() -> Result<(), io::Error> {
let listener = todo!("bind a listener to 127.0.0.1:7878");
for stream in todo!("accept incoming connections") {
// todo!("support multiple connections in parallel");
handle_client(stream)?;
}
Ok(())
}Help
Reading line by line
Rust by Example has a chapter showing examples of reading files line by line that can be adapted to TcpStream, too.
Solving borrow checker issues
At some point you may run into borrow checker issues because you are essentially trying to write into a stream as you read from it.
The solution is to end up with two separate owned variables that perform reading and writing respectively.
There are two general approaches to do so:
- Simply clone the stream.
TcpStreamhas atry_clone()method. This will not clone the stream itself: on the Operating System level there will still be a single connection. But from Rust perspective now this underlying OS resource will be represented by two distinct variables. - Use the fact that
ReadandWritetraits are implemented not only forTcpStreambut also for&TcpStream. For example, you can create a pair ofBufReaderandBufWriterby passing&streamas an argument.
Troubleshooting I/O operations
If you decide to use BufWriter to handle writes you may not see any text echoed back in the terminal when using nc. As the name applies the output is buffered, and you need to explicitly call flush() method for text to be send out over the TCP socket.
Running nc on Windows
Windows doesn’t come with a TCP client out of the box. You have a number of options:
- Git-for-Windows comes with
Git-Bash- a minimal Unix emulation layer. It has Windows ports of many popular UNIX command-line utilities, includingnc. - If you have WSL set up then your Linux environment has
nc(or it is available as a package). You may either run the exercise in your Linux environment, too, or connect from Linux guest to your host. - There’s a Windows-native version of
ncatfrom Nmap project that is available as a separate portable download - If you have access to a remote Linux server you can use SSH tunnelling to connect remote
ncto a TCP server running on your local machine.ssh -L 7878:<remote_host>:8888 <user>@<remote_host> -p <ssh_port>will let you runnc 0.0.0.0 8888on your Linux box and talk to a locally run TCP Echo server example. - If you have friends that can run
ncyou can let them connect to your developer machine and play a role of your client. It’s often possible if you share the same local network with them, but you can always rely onngrokorcloudflaredto expose a specific TCP port to anyone on the internet.
Solution
If you need it, we have provided several complete solution for this exercise.
Share data between connections
In this exercise we will take our interactive server and add a common log for lengths of messages that each client sends us. We will explore synchronization primitives that Rust offers in its Standard Library.
After completing this exercise you are able to
-
share data between threads using
Mutexes -
use reference-counting to ensure data stays available across multiple threads
-
use scoped threads to avoid runtime reference counting
-
use channels and message passing to share data among threads by communicating
Tasks
Part 1
-
Add a log to store length of messages:
let mut log: Vec<usize> = vec![]; -
Pass it to a
handle_clientfunction and record a length of each incoming line of text:log.push(line.len()); -
Resolve lifetime issues by using a reference-counting pointer.
-
Resolve mutability issues by using a mutex
Part 2
- Use the
thread::scopefunction to get rid of reference counting forlogvector
Part 3
- Instead of sharing
logvector use ampsc::channelto send length of lines from worker threads. - Create a separate thread that listens for new channel messages and updates the vector accordingly.
Connected Mailbox Exercise
In this exercise, we will take our “SimpleDB” protocol parser and turn it into a network-connected data storage service. When a user sends a “PUBLISH” we will push the data into a queue, and when the user sends a “RETRIEVE” we will pop some data off the queue (if any is available). The user will connect via TCP to port 7878.
After completing this exercise you are able to
-
write a Rust binary that uses a Rust library
-
combine two Rust packages into a Cargo Workspace
-
open a TCP port and perform an action when each user connects
-
use I/O traits to read/write from a TCP socket
Prerequisites
-
creating and running binary crates with
cargo -
using
matchto pattern-match on anenum, capturing any inner values -
using Rust’s
ReadandWriteI/O traits -
familiarity with TCP socket listening and accepting
Tasks
-
Create an empty folder called
connected-mailbox. Copy in thesimple-dbproject from before and create a new binary crate calledtcp-server, and put them both into a Cargo Workspace.📂 connected-mailbox ┣ 📄 Cargo.toml ┃ ┣ 📂 simple-db ┃ ┣ 📄 Cargo.toml ┃ ┗ ... ┃ ┗ 📂 tcp-server ┣ 📄 Cargo.toml ┗ ... -
Write a basic TCP Server which can listen for TCP connections on
127.0.0.1:7878. For each incoming connection, read all of the input as a string, and send it back to the client. -
Change the TCP Server to depend upon the
simple-dbcrate, using a relative path. -
Change your TCP Server to use your
simple-dbcrate to parse the input, and provide an appropriate canned response. -
Set up a
VecDequeand either push or pop from that queue, depending on the command you have received.
At every step, try out your program using a command-line TCP Client: you can either use nc, or netcat, or our supplied tools/tcp-client program.
echo "PUBLISH 1234" | nc 127.0.0.1 7878
The echo command adds a new-line character automatically. Use echo -n if you don’t want it to add a new-line character.
Optional Tasks:
- Run
cargo clippyon your codebase. - Run
cargo fmton your codebase. - Wrap your
VecDequeinto astruct Applicationwith a method that takes asimple-db::Commandand returns anOption<String>. Write some tests for it.
Help
Running nc on Windows
Windows doesn’t come with a TCP client out of the box. You have a number of options:
- Git-for-Windows comes with
Git-Bash- a minimal Unix emulation layer. It has Windows ports of many popular UNIX command-line utilities, includingnc. - If you have WSL set up then your Linux environment has
nc(or it is available as a package). You may either run the exercise in your Linux environment, too, or connect from Linux guest to your host. - There’s a Windows-native version of
ncatfrom Nmap project that is available as a separate portable download - If you have access to a remote Linux server you can use SSH tunnelling to connect remote
ncto a TCP server running on your local machine.ssh -L 7878:<remote_host>:8888 <user>@<remote_host> -p <ssh_port>will let you runnc 0.0.0.0 8888on your Linux box and talk to a locally run TCP Echo server example. - If you have friends that can run
ncyou can let them connect to your developer machine and play a role of your client. It’s often possible if you share the same local network with them, but you can always rely onngrokorcloudflaredto expose a specific TCP port to anyone on the internet.
Using our TCP Client
We have written a basic TCP Client which should work on any platform.
$ cd tools/tcp-client
$ cargo run -- "PUBLISH hello"
$ cargo run -- "RETRIEVE"
It automatically adds a newline character on to the end of every message you send. It is hard-coded to connect to a server at 127.0.0.1:7878.
Writing to a stream
If you want to write to an object that implements std::io::Write, you could use writeln!.
Solution
#![allow(unused)]
fn main() {
use std::io::prelude::*;
use std::net::{TcpStream};
fn handle_client(mut stream: TcpStream) -> Result<(), std::io::Error> {
let mut buffer = String::new();
stream.read_to_string(&mut buffer)?;
println!("Received: {:?}", buffer);
writeln!(stream, "Thank you for {buffer:?}!")?;
Ok(())
}
}Writing a TCP Server
If you need a working example of a basic TCP Echo server, you can start with this exercise.
Making a Workspace
Solution
A workspace file looks like:[workspace]
resolver= "2"
members = ["simple-db", "tcp-server"]
Each member is a folder containing a Cargo package (i.e. that contains a Cargo.toml file).
Handling Errors
Solution
In a binary program anyhow is a good way to handle top-level errors.
use std::io::Read;
fn handle_client(stream: &mut std::net::TcpStream) -> Result<(), anyhow::Error> {
// This returns a `Result<(), std::io::Error>`, and the `std::io::Error` will auto-convert into an `anyhow::Error`.
stream.read_to_string(&mut buffer)?;
/// ... etc
Ok(())
}You could also write an enum Error which has a variant for std::io::Error and a variant for simple_db::Error, and suitable impl From<...> for Error blocks.
When handling a client, you could .unwrap() the function which handles the client, but do you want to quit the server if the client sends a malformed message? Perhaps you should catch the result with a match, and print an error to the console before moving on to the next client.
Solution
If you need it, we have provided a complete solution for this exercise.
Multi-Threaded Mailbox Exercise
In this exercise, we will take our “Connected Mailbox” and make it multi-threaded. A new thread should be spawned for every incoming connection, and that thread should take ownership of the TcpStream and drive it to completion.
After completing this exercise you are able to
-
spawn threads
-
convert a non-thread-safe type into a thread-safe-type
-
lock a Mutex to access the data within
Prerequisites
- A completed “Connected Mailbox” solution
Tasks
-
Use the
std::thread::spawnAPI to start a new thead when your main loop produces a new connection to a client. Thehandle_clientfunction should be executed within that spawned thread. Note how Rust doesn’t let you pass&mut VecDeque<String>into the spawned thread, both because you have multiple&mutreferences (not allowed) and because the thread might live longer than theVecDeque(which only lives whilst themain()function is running, andmain()might quit at any time with an early return or a break out of the connection loop). -
Convert the
VecDequeinto aArc<Mutex<VecDeque>>(usestd::sync::Mutex). Change thehandle_clientfunction to take a&Mutex<VecDeque>. Clone the Arc handle with.clone()andmovethat cloned handle into the new thread. Change thehandle_clientfunction to calllet mut queue = your_mutex.lock().unwrap();whenever you want to access the queue inside the Mutex. -
Convert the
Arc<Mutex<VecDeque>>into aMutex<VecDeque>and introduce scoped threads withstd::thread::scope. TheMutex<VecDeque>should be created outside of the scope (ensure it lives longer than any of the scoped threads), but the connection loop should be inside the scope. Changestd::thread::spawnto bes.spawn, wheresis the name of the argument to the scope closure.
At every step (noting that Step 1 won’t actually work…), try out your program using a command-line TCP Client: you can either use nc, or netcat, or our supplied tools/tcp-client program.
Optional Tasks:
- Run
cargo clippyon your codebase. - Run
cargo fmton your codebase.
Help
Making a Arc, containing a Mutex, containing a VecDeque
You can just nest the calls to SomeType::new()…
Solution
use std::collections::VecDeque;
use std::sync::{Arc, Mutex};
fn main() {
// This type annotation isn't required if you actually push something into the queue...
let queue_handle: Arc<Mutex<VecDeque<String>>> = Arc::new(Mutex::new(VecDeque::new()));
}Spawning Threads
The std::thread::spawn function takes a closure. Rust will automatically try and borrow any local variables that the closure refers to but that were declared outside the closure. You can put move in front of the closure bars (e.g. move ||) to make Rust try and take ownership of variables instead of borrowing them.
You will want to clone the Arc and move the clone into the thread.
Solution
use std::collections::VecDeque;
use std::sync::{Arc, Mutex};
fn main() {
let queue_handle = Arc::new(Mutex::new(VecDeque::new()));
for _ in 0..10 {
// Clone the handle and move it into a new thread
let thread_queue_handle = queue_handle.clone();
std::thread::spawn(move || {
handle_client(&thread_queue_handle);
});
// This is the same, but fancier. It stops you passing the wrong Arc handle
// into the thread.
std::thread::spawn({ // this is a block expression
// This is declared inside the block, so it shadows the one from the
// outer scope.
let queue_handle = queue_handle.clone();
// this is the closure produced by the block expression
move || {
handle_client(&queue_handle);
}
});
}
// This doesn't need to know it's in an Arc, just that it's in a Mutex.
fn handle_client(locked_queue: &Mutex<VecDeque<String>>) {
todo!();
}
}Locking a Mutex
A value of type Mutex<T> has a lock() method, but this method can fail if the Mutex has been poisoned (i.e. a thread panicked whilst holding the lock). We generally don’t worry about handling the poisoned case (because one of your threads has already panicked, so the program is in a fairly bad state already), so we just use unwrap() to make this thread panic as well.
Solution
use std::collections::VecDeque;
use std::sync::{Arc, Mutex};
fn main() {
let queue_handle = Arc::new(Mutex::new(VecDeque::new()));
let mut inner_q = queue_handle.lock().unwrap();
inner_q.push_back("Hello".to_string());
println!("{:?}", inner_q.pop_front());
println!("{:?}", inner_q.pop_front());
}Creating a thread scope
Recall, the purpose of a thread scope is to satisfy the compiler that it is safe for a thread to borrow an item that is on the current function’s stack. It does this by ensuring that all threads created with the scope terminate before the thread scope ends (after which, the remainder of the function is executed including perhaps destruction or transfer of the variables that were borrowed).
Use std::thread::scope to create a scope, and pass it a closure containing the
bulk of your main function. Any variables you want to borrow should be created
before the thread scope is created, but you should wait for incoming connections
inside the thread scope (think about what happens to any spawned threads that
are still executing at the point you try and leave the thread scope).
Solution
use std::collections::VecDeque;
use std::sync::Mutex;
fn main() {
let locked_queue = Mutex::new(VecDeque::new());
std::thread::scope(|s| {
for i in 0..10 {
let locked_queue = &locked_queue;
s.spawn(move || {
let mut inner_q = locked_queue.lock().unwrap();
inner_q.push_back(i.to_string());
println!("Pop {:?}", inner_q.pop_front());
});
}
});
}Solution
If you need it, we have provided a complete solution for this exercise.
Self-Check Project
This exercise is intended for you to check your Rust knowledge. It is based on our other exercises, so you can follow those one by one instead of attempting to do everything in one go if you prefer.
In this exercise you will create a small in-memory message queue that is accessible over a TCP connection and uses a plain-text format for its protocol. The protocol has two commands: one to put a message into the back of the queue and one to read a message from the front of the queue. When a user sends a “PUBLISH” you will push the data into the queue, and when the user sends a “RETRIEVE” you will pop some data off the queue (if any is available). The user will connect via TCP to port 7878. You should handle multiple clients adding or removing messages from the queue at the same time.
Goals
After completing this exercise you will have demonstrated that you can:
-
write a Rust binary that uses a Rust library
-
combine two Rust packages into a Cargo workspace
-
open a TCP port and perform an action when each user connects
-
use I/O traits to read/write from a TCP socket
-
create a safe protocol parser in Rust manually
-
interact with borrowed and owned memory, especially how to take ownership
-
handle complex cases using the
matchandif letsyntax -
handle errors using
Resultand custom error types -
spawn threads
-
convert a non-thread-safe type into a thread-safe-type
-
lock a Mutex to access the data within
Tasks
-
Create a Cargo workspace for your project.
-
Create a binary package inside your workspace for your TCP server
-
Implement a simple TCP Server that listens for connections on
127.0.0.1:7878. For each incoming connection, read all of the input as a string, and send it back to the client. Disconnect the client if they send input that is not valid UTF-8. -
Create a package with a library crate inside your workspace for the message protocol parser. Make your TCP server depend on that library using a relative path.
-
Inside your library implement the following function so that it implements the protocol specifications to parse the messages. Use the provided tests to help you with the case handling.
pub fn parse(input: &str) -> Result<Command, Error> { todo!() } -
Change your TCP Server to use your parser crate to parse the input, and provide an appropriate canned response.
-
Set up a
VecDequequeue and either push or pop from that queue, depending on the command you have received. -
Add support for multiple simultaneous client connections using threads. Make sure all clients read and write to the same shared queue.
Optional Tasks
- Allow each connection to read input line by line as a sequence of commands and execute them in the same order as they come in. This way you should be able to open several connections in terminal and type commands in them one by one.
- Handle slow clients by disconnecting them if the input isn’t received within some timeout.
- Run
cargo fmton your codebase. - Run
cargo clippyon your codebase.
Protocol Specification
The protocol has two commands that are sent as messages in the following form:
-
PUBLISH <payload>\n -
RETRIEVE\n
With the additional properties:
-
The payload cannot contain newlines.
-
A missing newline at the end of the command is an error.
-
Data after the first newline is an error.
-
Empty payloads are allowed. In this case, the command is
PUBLISH \n.
Violations against the form of the messages and the properties are handled with the following error codes:
-
UnexpectedNewline(a newline not at the end of the line) -
IncompleteMessage(no newline at the end) -
EmptyMessage(empty string instead of a command) -
UnknownCommand(string is not empty, but neitherPUBLISHnorRECEIVE) -
UnexpectedPayload(message contains a payload, when it should not) -
MissingPayload(message is missing a payload)
Testing
Below are the tests your protocol parser needs to pass. You can copy them to the bottom of your lib.rs.
#[cfg(test)]
mod tests {
use super::*;
// Tests placement of \n
#[test]
fn test_missing_nl() {
let line = "RETRIEVE";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::IncompleteMessage);
assert_eq!(result, expected);
}
#[test]
fn test_trailing_data() {
let line = "PUBLISH The message\n is wrong \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedNewline);
assert_eq!(result, expected);
}
#[test]
fn test_empty_string() {
let line = "";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::IncompleteMessage);
assert_eq!(result, expected);
}
// Tests for empty messages and unknown commands
#[test]
fn test_only_nl() {
let line = "\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::EmptyMessage);
assert_eq!(result, expected);
}
#[test]
fn test_unknown_command() {
let line = "SERVE \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnknownCommand);
assert_eq!(result, expected);
}
// Tests correct formatting of RETRIEVE command
#[test]
fn test_retrieve_w_whitespace() {
let line = "RETRIEVE \n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedPayload);
assert_eq!(result, expected);
}
#[test]
fn test_retrieve_payload() {
let line = "RETRIEVE this has a payload\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::UnexpectedPayload);
assert_eq!(result, expected);
}
#[test]
fn test_retrieve() {
let line = "RETRIEVE\n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Retrieve);
assert_eq!(result, expected);
}
// Tests correct formatting of PUBLISH command
#[test]
fn test_publish() {
let line = "PUBLISH TestMessage\n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Publish("TestMessage".into()));
assert_eq!(result, expected);
}
#[test]
fn test_empty_publish() {
let line = "PUBLISH \n";
let result: Result<Command, Error> = parse(line);
let expected = Ok(Command::Publish("".into()));
assert_eq!(result, expected);
}
#[test]
fn test_missing_payload() {
let line = "PUBLISH\n";
let result: Result<Command, Error> = parse(line);
let expected = Err(Error::MissingPayload);
assert_eq!(result, expected);
}
}Help
Connecting over TCP/IP
Using nc, netcat or ncat
The nc, netcat, or ncat tools may be available on your macOS or Linux machine, or on WSL on windows. They all work in a similar fashion.
$ echo "PUBLISH 1234" | nc 127.0.0.1 7878
The echo command adds a new-line character automatically. Use echo -n if you don’t want it to add a new-line character.
Using our TCP Client
We have written a basic TCP Client which should work on any platform.
$ cd tools/tcp-client
$ cargo run -- "PUBLISH hello"
$ cargo run -- "RETRIEVE"
It automatically adds a newline character on to the end of every message you send. It is hard-coded to connect to a server at 127.0.0.1:7878.
Solution
This exercise is based on three other exercises. Check their solutions below:
Writing an async chat
Nothing is simpler than creating a chat server, right? Not quite, chat servers expose you to all the fun of asynchronous programming:
How will the server handle clients connecting concurrently?
How will it handle them disconnecting?
How will it distribute the messages?
This tutorial explains how to write a chat server in tokio.
Specification and Getting Started
Specification
The chat uses a simple text protocol over TCP.
The protocol consists of utf-8 messages, separated by \n.
The client connects to the server and sends login as a first line. After that, the client can send messages to other clients using the following syntax:
login1, login2, ... loginN: message
Each of the specified clients then receives a from login: message message.
A possible session might look like this
On Alice's computer: | On Bob's computer:
> alice | > bob
> bob: hello < from alice: hello
| > alice, bob: hi!
< from bob: hi!
< from bob: hi! |
The main challenge for the chat server is keeping track of many concurrent connections. The main challenge for the chat client is managing concurrent outgoing messages, incoming messages and user’s typing.
Getting Started
Let’s create a new Cargo project:
$ cargo new a-chat
$ cd a-chat
Add the following lines to Cargo.toml:
[dependencies]
tokio = { version = "1", features = ["full"] }
Writing an Accept Loop
Writing an Accept Loop
Let’s implement the scaffold of the server: a loop that binds a TCP socket to an address and starts accepting connections.
First of all, let’s add required import boilerplate:
extern crate tokio;
use std::future::Future; // 1
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader}, // 2
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs}, // 3
sync::{mpsc, oneshot},
task, // 4
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>; // 5- Import traits required to work with futures.
- Import traits required to work with streams.
- For the socket type, we use
TcpListenerfromtokio, which is similar to the syncstd::net::TcpListener, but is non-blocking and usesasyncAPI. - The
taskmodule roughly corresponds to thestd::threadmodule, but tasks are much lighter weight. A single thread can run many tasks. - We will skip implementing detailed error handling in this example.
To propagate the errors, we will use a boxed error trait object.
Do you know that there’s
From<&'_ str> for Box<dyn Error>implementation in stdlib, which allows you to use strings with?operator?
Now we can write the server’s accept loop:
extern crate tokio;
use tokio::net::{TcpListener, ToSocketAddrs};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
async fn accept_loop(addr: impl ToSocketAddrs) -> Result<()> { // 1
let listener = TcpListener::bind(addr).await?; // 2
loop { // 3
let (stream, _) = listener.accept().await?;
// TODO
}
Ok(())
}- We mark the
accept_loopfunction asasync, which allows us to use.awaitsyntax inside. TcpListener::bindcall returns a future, which we.awaitto extract theResult, and then?to get aTcpListener. Note how.awaitand?work nicely together. This is exactly howstd::net::TcpListenerworks, but with.awaitadded.- We generally use
loopandbreakfor looping in Futures, that makes things easier down the line.
Finally, let’s add main:
extern crate tokio;
use tokio::net::{ToSocketAddrs};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
async fn accept_loop(addr: impl ToSocketAddrs) -> Result<()> {
Ok(())
}
#[tokio::main]
pub(crate) async fn main() -> Result<()> {
accept_loop("127.0.0.1:8080").await
}The crucial thing to realise is that in Rust, unlike in other languages, calling an async function does not run any code.
Async functions only construct futures, which are inert state machines.
To start stepping through the future state-machine in an async function, you should use .await.
In a non-async function, a way to execute a future is to hand it to the executor.
Receiving Messages
Receiving messages
Let’s implement the receiving part of the protocol. We need to:
- split incoming
TcpStreamon\nand decode bytes as utf-8 - interpret the first line as a login
- parse the rest of the lines as a
login: message
We recommend that you speed through this quickly, it is mostly a lot of uninteresting protocol minutia.
extern crate tokio;
use std::{
collections::hash_map::{Entry, HashMap},
future::Future,
};
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs},
sync::{mpsc, oneshot},
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
async fn accept_loop(addr: impl ToSocketAddrs) -> Result<()> {
let listener = TcpListener::bind(addr).await?;
loop {
let (stream, _socket_addr) = listener.accept().await?;
println!("Accepting from: {}", stream.peer_addr()?);
let _handle = task::spawn(connection_loop(stream)); // 1
}
Ok(())
}
async fn connection_loop(stream: TcpStream) -> Result<()> {
let reader = BufReader::new(stream);
let mut lines = reader.lines(); // 2
// 3
let name = match lines.next_line().await? {
None => Err("peer disconnected immediately")?,
Some(line) => line,
};
println!("name = {}", name);
// 4
loop {
if let Some(line) = lines.next_line().await? {
// 5
let (dest, msg) = match line.find(':') {
None => continue,
Some(idx) => (&line[..idx], line[idx + 1..].trim()),
};
let dest = dest
.split(',')
.map(|name| name.trim().to_string())
.collect::<Vec<_>>();
let msg = msg.to_string();
// TODO: this is temporary
println!("Received message: {}", msg);
} else {
break
}
}
Ok(())
}-
We use
task::spawnfunction to spawn an independent task for working with each client. That is, after accepting the client theaccept_loopimmediately starts waiting for the next one. This is the core benefit of event-driven architecture: we serve many clients concurrently, without spending many hardware threads. -
Luckily, the “split byte stream into lines” functionality is already implemented.
.lines()call returns a stream ofString’s. -
We get the first line – login
-
And, once again, we implement a manual async loop.
-
Finally, we parse each line into a list of destination logins and the message itself.
Managing Errors
One issue with the previous solution is that while we correctly propagate errors in the connection_loop, we just drop the error afterwards!
That is, task::spawn does not return an error immediately (it can’t, it needs to run the future to completion first), only after it is joined.
We can “fix” it by waiting for the task to be joined, like this:
extern crate tokio;
use tokio::{
net::TcpStream,
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
async fn connection_loop(stream: TcpStream) -> Result<()> {
Ok(())
}
async fn accept_loop(stream: TcpStream) -> Result<()> {
let handle = task::spawn(connection_loop(stream));
handle.await?
}The .await waits until the client finishes, and ? propagates the result.
There are two problems with this solution however!
- First, because we immediately await the client, we can only handle one client at a time, and that completely defeats the purpose of async!
- Second, if a client encounters an IO error, the whole server immediately exits. That is, a flaky internet connection of one peer brings down the whole chat room!
The correct way to handle client errors in this case is log them, and continue serving other clients. So let’s use a helper function for this:
extern crate tokio;
use std::future::Future;
use tokio::task;
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
fn spawn_and_log_error<F>(fut: F) -> task::JoinHandle<()>
where
F: Future<Output = Result<()>> + Send + 'static,
{
task::spawn(async move {
if let Err(e) = fut.await {
eprintln!("{}", e)
}
})
}Sending Messages
Sending Messages
Now it’s time to implement the other half – sending messages.
As a rule of thumb, only a single task should write to each TcpStream.
This way, we also have compartmentalised that activity and automatically serialize all outgoing messages.
So let’s create a connection_writer_loop task which receives messages over a channel and writes them to the socket.
If Alice and Charley send two messages to Bob at the same time, Bob will see the messages in the same order as they arrive in the channel.
extern crate tokio;
use std::{
collections::hash_map::{Entry, HashMap},
future::Future,
};
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs},
sync::oneshot,
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
use tokio::sync::mpsc; // 1
type Sender<T> = mpsc::UnboundedSender<T>; // 2
type Receiver<T> = mpsc::UnboundedReceiver<T>;
async fn connection_writer_loop(
messages: &mut Receiver<String>,
stream: &mut OwnedWriteHalf // 3
) -> Result<()> {
loop {
let msg = messages.recv().await;
match msg {
Some(msg) => stream.write_all(msg.as_bytes()).await?,
None => break,
}
}
Ok(())
}-
We will use
mpscchannels fromtokio. -
For simplicity, we will use
unboundedchannels, and won’t be discussing backpressure in this tutorial. -
As
connection_loopandconnection_writer_loopshare the sameTcpStream, we use splitting. We’ll glue this together later.extern crate tokio; use tokio::net::TcpStream; async fn connection_loop(stream: TcpStream) { use tokio::net::tcp; let (reader, writer): (tcp::OwnedReadHalf, tcp::OwnedWriteHalf) = stream.into_split(); }
A broker as a connection point
A broker as a connection point
So how do we make sure that messages read in connection_loop flow into the relevant connection_writer_loop?
We should somehow maintain a peers: HashMap<String, Sender<String>> map which allows a client to find destination channels.
However, this map would be a bit of shared mutable state, so we’ll have to wrap an RwLock over it and answer tough questions about what should happen if the client joins at the same moment as it receives a message.
One trick to make reasoning about state simpler is by taking inspiration from the actor model.
We can create a dedicated broker task which owns the peers map and communicates with other tasks using channels.
The broker reacts on events and appropriately informs the peers.
By hiding peer handling inside such an “actor” task, we remove the need for mutexes and also make the serialization point explicit.
The order of events “Bob sends message to Alice” and “Alice joins” is determined by the order of the corresponding events in the broker’s event queue.
extern crate tokio;
use std::future::Future;
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs},
sync::{mpsc, oneshot},
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
type Sender<T> = mpsc::UnboundedSender<T>;
type Receiver<T> = mpsc::UnboundedReceiver<T>;
async fn connection_writer_loop(
messages: &mut Receiver<String>,
stream: &mut OwnedWriteHalf,
) -> Result<()> {
Ok(())
}
fn spawn_and_log_error<F>(fut: F) -> task::JoinHandle<()>
where
F: Future<Output = Result<()>> + Send + 'static,
{
unimplemented!()
}
use std::collections::hash_map::{Entry, HashMap};
#[derive(Debug)]
enum Event { // 1
NewPeer {
name: String,
stream: OwnedWriteHalf,
},
Message {
from: String,
to: Vec<String>,
msg: String,
},
}
async fn broker_loop(mut events: Receiver<Event>) {
let mut peers: HashMap<String, Sender<String>> = HashMap::new(); // 2
loop {
let event = match events.recv().await {
Some(event) => event,
None => break,
};
match event {
Event::Message { from, to, msg } => { // 3
for addr in to {
if let Some(peer) = peers.get_mut(&addr) {
let msg = format!("from {from}: {msg}\n");
peer.send(msg).unwrap();
}
}
}
Event::NewPeer { name, mut stream } => match peers.entry(name.clone()) {
Entry::Occupied(..) => (),
Entry::Vacant(entry) => {
let (client_sender, mut client_receiver) = mpsc::unbounded_channel();
entry.insert(client_sender); // 4
spawn_and_log_error(async move {
connection_writer_loop(&mut client_receiver, &mut stream).await
}); // 5
}
},
}
}
}- The broker task should handle two types of events: a message or an arrival of a new peer.
- The internal state of the broker is a
HashMap. Note how we don’t need aMutexhere and can confidently say, at each iteration of the broker’s loop, what is the current set of peers. - To handle a message, we send it over a channel to each destination.
- To handle a new peer, we first register it in the peer’s map …
- … and then spawn a dedicated task to actually write the messages to the socket.
Glueing all together
Gluing it all together
At this point, we only need to start the broker to get a fully-functioning (in the happy case!) chat.
Scroll past the example find a list of all changes.
extern crate tokio;
use std::{
collections::hash_map::{Entry, HashMap},
future::Future,
};
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs},
sync::mpsc,
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
type Sender<T> = mpsc::UnboundedSender<T>;
type Receiver<T> = mpsc::UnboundedReceiver<T>;
#[tokio::main]
pub(crate) async fn main() -> Result<()> {
accept_loop("127.0.0.1:8080").await
}
async fn accept_loop(addr: impl ToSocketAddrs) -> Result<()> {
let listener = TcpListener::bind(addr).await?;
let (broker_sender, broker_receiver) = mpsc::unbounded_channel(); // 1
let _broker = task::spawn(broker_loop(broker_receiver));
while let Ok((stream, _socket_addr)) = listener.accept().await {
println!("Accepting from: {}", stream.peer_addr()?);
spawn_and_log_error(connection_loop(broker_sender.clone(), stream));
}
Ok(())
}
async fn connection_loop(broker: Sender<Event>, stream: TcpStream) -> Result<()> { // 2
let (reader, writer) = stream.into_split(); // 3
let reader = BufReader::new(reader);
let mut lines = reader.lines();
let name = match lines.next_line().await {
Ok(Some(line)) => line,
Ok(None) => return Err("peer disconnected immediately".into()),
Err(e) => return Err(Box::new(e)),
};
println!("user {} connected", name);
broker
.send(Event::NewPeer {
name: name.clone(),
stream: writer,
})
.unwrap(); // 5
loop {
if let Some(line) = lines.next_line().await? {
let (dest, msg) = match line.find(':') {
None => continue,
Some(idx) => (&line[..idx], line[idx + 1..].trim()),
};
let dest: Vec<String> = dest
.split(',')
.map(|name| name.trim().to_string())
.collect();
let msg: String = msg.trim().to_string();
broker
.send(Event::Message { // 4
from: name.clone(),
to: dest,
msg,
})
.unwrap();
} else {
break;
}
}
Ok(())
}
async fn connection_writer_loop(
messages: &mut Receiver<String>,
stream: &mut OwnedWriteHalf // 3
) -> Result<()> {
loop {
let msg = messages.recv().await;
match msg {
Some(msg) => stream.write_all(msg.as_bytes()).await?,
None => break,
}
}
Ok(())
}
#[derive(Debug)]
enum Event {
NewPeer {
name: String,
stream: OwnedWriteHalf,
},
Message {
from: String,
to: Vec<String>,
msg: String,
},
}
async fn broker_loop(mut events: Receiver<Event>) {
let mut peers: HashMap<String, Sender<String>> = HashMap::new();
loop {
let event = match events.recv().await {
Some(event) => event,
None => break,
};
match event {
Event::Message { from, to, msg } => {
for addr in to {
if let Some(peer) = peers.get_mut(&addr) {
let msg = format!("from {from}: {msg}\n");
peer.send(msg).unwrap();
}
}
}
Event::NewPeer { name, mut stream } => match peers.entry(name.clone()) {
Entry::Occupied(..) => (),
Entry::Vacant(entry) => {
let (client_sender, mut client_receiver) = mpsc::unbounded_channel();
entry.insert(client_sender);
spawn_and_log_error(async move {
connection_writer_loop(&mut client_receiver, &mut stream).await
});
}
},
}
}
}
fn spawn_and_log_error<F>(fut: F) -> task::JoinHandle<()>
where
F: Future<Output = Result<()>> + Send + 'static,
{
task::spawn(async move {
if let Err(e) = fut.await {
eprintln!("{}", e)
}
})
}- Inside the
accept_loop, we create the broker’s channel andtask. - We need the connection_loop to accept a handle to the broker.
- Inside
connection_loop, we need to split theTcpStream, to be able to share it with theconnection_writer_loop. - On login, we notify the broker.
Note that we
.unwrapon send: broker should outlive all the clients and if that’s not the case the broker probably panicked, so we can escalate the panic as well. - Similarly, we forward parsed messages to the broker, assuming that it is alive.
Clean Shutdown
Clean Shutdown
One of the problems with the current implementation is that it doesn’t handle graceful shutdown. If we break from the accept loop for some reason, all in-flight tasks are just dropped.
Instead, let’s intercept Ctrl-C and implement a more correct shutdown sequence:
- Stop accepting new clients
- Notify the readers we’re not accepting new messages
- Deliver all pending messages
- Exit the process
A clean shutdown in a channel based architecture is easy, although it can appear a magic trick at first.
In Rust, receiver side of a channel is closed as soon as all senders are dropped.
That is, as soon as producers exit and drop their senders, the rest of the system shuts down naturally.
In tokio this translates to two rules:
- Make sure that channels form an acyclic graph.
- Take care to wait, in the correct order, until intermediate layers of the system process pending messages.
In a-chat, we already have an unidirectional flow of messages: reader -> broker -> writer.
However, we never wait for broker and writers, which might cause some messages to get dropped.
We also need to notify all readers that we are going to stop accepting messages. Here, we use tokio::sync::Notify.
Let’s first add the notification feature to the readers.
We have to start using select! here to work
async fn connection_loop(broker: Sender<Event>, stream: TcpStream, shutdown: Arc<Notify>) -> Result<()> {
// ...
loop {
tokio::select! {
Ok(Some(line)) = lines.next_line() => {
let (dest, msg) = match line.split_once(':') {
None => continue,
Some((dest, msg)) => (dest, msg.trim()),
};
let dest: Vec<String> = dest
.split(',')
.map(|name| name.trim().to_string())
.collect();
let msg: String = msg.trim().to_string();
broker
.send(Event::Message {
from: name.clone(),
to: dest,
msg,
})
.unwrap();
},
_ = shutdown.notified() => break,
}
}
}Let’s add Ctrl-C handling and waiting to the server.
extern crate tokio;
use std::{
collections::hash_map::{Entry, HashMap},
future::Future,
};
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs},
sync::{mpsc, oneshot, Notify},
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
type Sender<T> = mpsc::UnboundedSender<T>;
type Receiver<T> = mpsc::UnboundedReceiver<T>;
enum Event {
NewPeer {
name: String,
stream: OwnedWriteHalf,
shutdown: oneshot::Receiver<()>,
},
Message {
from: String,
to: Vec<String>,
msg: String,
},
}
async fn broker_loop(mut events: Receiver<Event>) {}
async fn connection_loop(broker: Sender<Event>, stream: TcpStream) -> Result<()> {
Ok(())
}
fn spawn_and_log_error<F>(fut: F) -> task::JoinHandle<()>
where
F: Future<Output = Result<()>> + Send + 'static,
{
unimplemented!()
}
async fn accept_loop(addr: impl ToSocketAddrs) -> Result<()> {
let listener = TcpListener::bind(addr).await?;
let (broker_sender, broker_receiver) = mpsc::unbounded_channel();
let broker = task::spawn(broker_loop(broker_receiver));
let shutdown_notification = Arc::new(Notify::new());
loop {
tokio::select!{
Ok((stream, _socket_addr)) = listener.accept() => {
println!("Accepting from: {}", stream.peer_addr()?);
spawn_and_log_error(connection_loop(broker_sender.clone(), stream, shutdown_notification.clone()));
},
_ = tokio::signal::ctrl_c() => break,
}
}
println!("Shutting down server!");
shutdown_notification.notify_waiters(); // 1
drop(broker_sender); // 2
broker.await?; // 5
Ok(())
}And to the broker:
extern crate tokio;
use std::{
collections::hash_map::{Entry, HashMap},
future::Future,
};
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs},
sync::{mpsc, oneshot},
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
type Sender<T> = mpsc::UnboundedSender<T>;
type Receiver<T> = mpsc::UnboundedReceiver<T>;
enum Event {
NewPeer {
name: String,
stream: OwnedWriteHalf,
shutdown: oneshot::Receiver<()>,
},
Message {
from: String,
to: Vec<String>,
msg: String,
},
}
async fn connection_loop(broker: Sender<Event>, stream: TcpStream) -> Result<()> {
Ok(())
}
fn spawn_and_log_error<F>(fut: F) -> task::JoinHandle<()>
where
F: Future<Output = Result<()>> + Send + 'static,
{
unimplemented!()
}
async fn connection_writer_loop(
messages: &mut Receiver<String>,
stream: &mut OwnedWriteHalf,
mut shutdown: oneshot::Receiver<()>,
) -> Result<()> {
Ok(())
}
async fn broker_loop(mut events: Receiver<Event>) {
let mut peers: HashMap<String, Sender<String>> = HashMap::new();
loop {
let event = match events.recv().await {
Some(event) => event,
None => break,
};
match event {
Event::Message { from, to, msg } => {
// ...
}
Event::NewPeer {
name,
mut stream,
} => match peers.entry(name.clone()) {
Entry::Occupied(..) => (),
Entry::Vacant(entry) => {
let (client_sender, mut client_receiver) = mpsc::unbounded_channel();
entry.insert(client_sender);
spawn_and_log_error(async move {
connection_writer_loop(&mut client_receiver, &mut stream).await
});
}
},
}
}
drop(peers) //4
}Notice what happens with all of the channels once we exit the accept loop:
- We notify all readers to stop accepting messages.
- We drop the main broker’s sender. That way when the readers are done, there’s no sender for the broker’s channel, and the channel closes.
- Next, the broker exits
while let Some(event) = events.next().awaitloop. - It’s crucial that, at this stage, we drop the
peersmap. This drops writer’s senders. - Tokio will automatically wait for all finishing futures
- Finally, we join the broker, which also guarantees that all the writes have terminated.
Handling Disconnection
Handling Disconnections
Currently, we only ever add new peers to the map. This is clearly wrong: if a peer closes connection to the chat, we should not try to send any more messages to it.
One subtlety with handling disconnection is that we can detect it either in the reader’s task, or in the writer’s task.
The most obvious solution here is to just remove the peer from the peers map in both cases, but this would be wrong.
If both read and write fail, we’ll remove the peer twice, but it can be the case that the peer reconnected between the two failures!
To fix this, we will only remove the peer when the write side finishes.
If the read side finishes we will notify the write side that it should stop as well.
That is, we need to add an ability to signal shutdown for the writer task.
One way to approach this is a shutdown: Receiver<()> channel.
There’s a more minimal solution however, which makes clever use of RAII (Resource Acquisition Is Initialization).
Closing a channel is a synchronization event, so we don’t need to send a shutdown message, we can just drop the sender.
This way, we statically guarantee that we issue shutdown exactly once, even if we early return via ? or panic.
First, let’s add a shutdown channel to the connection_loop:
extern crate tokio;
use std::future::Future;
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs},
sync::{mpsc, oneshot},
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
type Sender<T> = mpsc::UnboundedSender<T>;
type Receiver<T> = mpsc::UnboundedReceiver<T>;
async fn connection_writer_loop(
messages: &mut Receiver<String>,
stream: &mut OwnedWriteHalf,
) -> Result<()> {
Ok(())
}
fn spawn_and_log_error<F>(fut: F) -> task::JoinHandle<()>
where
F: Future<Output = Result<()>> + Send + 'static,
{
unimplemented!()
}
#[derive(Debug)]
enum Event {
NewPeer {
name: String,
stream: OwnedWriteHalf,
shutdown: oneshot::Receiver<()>, // 1
},
Message {
from: String,
to: Vec<String>,
msg: String,
},
}
async fn connection_loop(broker: Sender<Event>, stream: TcpStream) -> Result<()> {
let (reader, writer) = stream.into_split();
let reader = BufReader::new(reader);
let mut lines = reader.lines();
let name: String = String::new();
// ...
let (_shutdown_sender, shutdown_receiver) = oneshot::channel::<()>(); // 3
broker
.send(Event::NewPeer {
name: name.clone(),
stream: writer,
shutdown: shutdown_receiver, // 2
})
.unwrap();
// ...
unimplemented!()
}- To enforce that no messages are sent along the shutdown channel, we use a oneshot channel.
- We pass the shutdown channel to the writer task.
- In the reader, we create a
_shutdown_senderwhose only purpose is to get dropped.
In the connection_writer_loop, we now need to choose between shutdown and message channels.
We use the select macro for this purpose:
async fn connection_writer_loop(
messages: &mut Receiver<String>,
stream: &mut OwnedWriteHalf,
mut shutdown: oneshot::Receiver<()>, // 1
) -> Result<()> {
loop { // 2
tokio::select! {
msg = messages.recv() => match msg {
Some(msg) => stream.write_all(msg.as_bytes()).await?,
None => break,
},
_ = &mut shutdown => break // 3
}
}
println!("Closing connection_writer loop!");
Ok(())
}- We add shutdown channel as an argument.
- Because of
select, we can’t use awhile letloop, so we desugar it further into aloop. - In the shutdown case break the loop.
Another problem is that between the moment we detect disconnection in connection_writer_loop and the moment when we actually remove the peer from the peers map, new messages might be pushed into the peer’s channel.
The final thing to handle is actually clean up our peers map. Here, we need to establish a communication back to the broker. However, we can handle that completely within the brokers scope, to not infect the writer loop with this concern.
To not lose these messages completely, we’ll return the writers messages receiver back to the broker. This also allows us to establish a useful invariant that the message channel strictly outlives the peer in the peers map, and makes the broker itself infallible.
async fn broker_loop(mut events: Receiver<Event>) {
let (disconnect_sender, mut disconnect_receiver) =
mpsc::unbounded_channel::<(String, Receiver<String>)>(); // 1
let mut peers: HashMap<String, Sender<String>> = HashMap::new();
loop {
let event = tokio::select! {
event = events.recv() => match event {
None => break,
Some(event) => event,
},
disconnect = disconnect_receiver.recv() => {
let (name, _pending_messages) = disconnect.unwrap();
assert!(peers.remove(&name).is_some());
println!("user {} disconnected", name);
continue;
},
};
match event {
Event::Message { from, to, msg } => {
// ...
}
Event::NewPeer {
name,
mut stream,
shutdown,
} => match peers.entry(name.clone()) {
Entry::Occupied(..) => (),
Entry::Vacant(entry) => {
// ...
spawn_and_log_error(async move {
let res =
connection_writer_loop(&mut client_receiver, &mut stream, shutdown)
.await;
println!("user {} disconnected", name);
disconnect_sender.send((name, client_receiver)).unwrap(); // 2
res
});
}
},
}
}
drop(peers);
drop(disconnect_sender);
while let Some((_name, _pending_messages)) = disconnect_receiver.recv().await {}
}Final Server Code
The final code looks like this:
use std::{
collections::hash_map::{Entry, HashMap},
future::Future,
sync::Arc,
};
use tokio::{
io::{AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{tcp::OwnedWriteHalf, TcpListener, TcpStream, ToSocketAddrs},
sync::{mpsc, oneshot, Notify},
task,
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
type Sender<T> = mpsc::UnboundedSender<T>;
type Receiver<T> = mpsc::UnboundedReceiver<T>;
#[tokio::main]
pub(crate) async fn main() -> Result<()> {
accept_loop("127.0.0.1:8080").await
}
async fn accept_loop(addr: impl ToSocketAddrs) -> Result<()> {
let listener = TcpListener::bind(addr).await?;
let (broker_sender, broker_receiver) = mpsc::unbounded_channel();
let broker = task::spawn(broker_loop(broker_receiver));
let shutdown_notification = Arc::new(Notify::new());
loop {
tokio::select!{
Ok((stream, _socket_addr)) = listener.accept() => {
println!("Accepting from: {}", stream.peer_addr()?);
spawn_and_log_error(connection_loop(broker_sender.clone(), stream, shutdown_notification.clone()));
},
_ = tokio::signal::ctrl_c() => break,
}
}
println!("Shutting down!");
shutdown_notification.notify_waiters();
drop(broker_sender);
broker.await?;
Ok(())
}
async fn connection_loop(broker: Sender<Event>, stream: TcpStream, shutdown: Arc<Notify>) -> Result<()> {
let (reader, writer) = stream.into_split();
let reader = BufReader::new(reader);
let mut lines = reader.lines();
let (shutdown_sender, shutdown_receiver) = oneshot::channel::<()>();
let name = match lines.next_line().await {
Ok(Some(line)) => line,
Ok(None) => return Err("peer disconnected immediately".into()),
Err(e) => return Err(Box::new(e)),
};
println!("user {} connected", name);
broker
.send(Event::NewPeer {
name: name.clone(),
stream: writer,
shutdown: shutdown_receiver,
})
.unwrap();
loop {
tokio::select! {
Ok(Some(line)) = lines.next_line() => {
let (dest, msg) = match line.split_once(':') {
None => continue,
Some((dest, msg)) => (dest, msg.trim()),
};
let dest: Vec<String> = dest
.split(',')
.map(|name| name.trim().to_string())
.collect();
let msg: String = msg.trim().to_string();
broker
.send(Event::Message {
from: name.clone(),
to: dest,
msg,
})
.unwrap();
},
_ = shutdown.notified() => break,
}
}
println!("Closing connection loop!");
drop(shutdown_sender);
Ok(())
}
async fn connection_writer_loop(
messages: &mut Receiver<String>,
stream: &mut OwnedWriteHalf,
mut shutdown: oneshot::Receiver<()>,
) -> Result<()> {
loop {
tokio::select! {
msg = messages.recv() => match msg {
Some(msg) => stream.write_all(msg.as_bytes()).await?,
None => break,
},
_ = &mut shutdown => break
}
}
println!("Closing connection_writer loop!");
Ok(())
}
#[derive(Debug)]
enum Event {
NewPeer {
name: String,
stream: OwnedWriteHalf,
shutdown: oneshot::Receiver<()>,
},
Message {
from: String,
to: Vec<String>,
msg: String,
},
}
async fn broker_loop(mut events: Receiver<Event>) {
let (disconnect_sender, mut disconnect_receiver) =
mpsc::unbounded_channel::<(String, Receiver<String>)>();
let mut peers: HashMap<String, Sender<String>> = HashMap::new();
loop {
let event = tokio::select! {
event = events.recv() => match event {
None => break,
Some(event) => event,
},
disconnect = disconnect_receiver.recv() => {
let (name, _pending_messages) = disconnect.unwrap();
assert!(peers.remove(&name).is_some());
println!("user {} disconnected", name);
continue;
},
};
match event {
Event::Message { from, to, msg } => {
for addr in to {
if let Some(peer) = peers.get_mut(&addr) {
let msg = format!("from {}: {}\n", from, msg);
peer.send(msg).unwrap();
}
}
}
Event::NewPeer {
name,
mut stream,
shutdown,
} => match peers.entry(name.clone()) {
Entry::Occupied(..) => (),
Entry::Vacant(entry) => {
let (client_sender, mut client_receiver) = mpsc::unbounded_channel();
entry.insert(client_sender);
let disconnect_sender = disconnect_sender.clone();
spawn_and_log_error(async move {
let res =
connection_writer_loop(&mut client_receiver, &mut stream, shutdown)
.await;
println!("user {} disconnected", name);
disconnect_sender.send((name, client_receiver)).unwrap();
res
});
}
},
}
}
drop(peers);
drop(disconnect_sender);
while let Some((_name, _pending_messages)) = disconnect_receiver.recv().await {}
}
fn spawn_and_log_error<F>(fut: F) -> task::JoinHandle<()>
where
F: Future<Output = Result<()>> + Send + 'static,
{
task::spawn(async move {
if let Err(e) = fut.await {
eprintln!("{}", e)
}
})
}Implementing a Client
Implementing a client
Since the protocol is line-based, implementing a client for the chat is straightforward:
- Lines read from stdin should be sent over the socket.
- Lines read from the socket should be echoed to stdout.
Although async does not significantly affect client performance (as unlike the server, the client interacts solely with one user and only needs limited concurrency), async is still useful for managing concurrency!
The client has to read from stdin and the socket simultaneously.
Programming this with threads is cumbersome, especially when implementing a clean shutdown.
With async, the select! macro is all that is needed.
extern crate tokio;
use tokio::{
io::{stdin, AsyncBufReadExt, AsyncWriteExt, BufReader},
net::{TcpStream, ToSocketAddrs},
};
type Result<T> = std::result::Result<T, Box<dyn std::error::Error + Send + Sync>>;
// main
async fn run() -> Result<()> {
try_main("127.0.0.1:8080").await
}
async fn try_main(addr: impl ToSocketAddrs) -> Result<()> {
let stream = TcpStream::connect(addr).await?;
let (reader, mut writer) = stream.into_split();
let mut lines_from_server = BufReader::new(reader).lines(); // 2
let mut lines_from_stdin = BufReader::new(stdin()).lines(); // 3
loop {
tokio::select! { // 4
line = lines_from_server.next_line() => match line {
Ok(Some(line)) => {
println!("{}", line);
},
Ok(None) => break,
Err(e) => eprintln!("Error {:?}:", e),
},
line = lines_from_stdin.next_line() => match line {
Ok(Some(line)) => {
writer.write_all(line.as_bytes()).await?;
writer.write_all(b"\n").await?;
},
Ok(None) => break,
Err(e) => eprintln!("Error {:?}:", e),
}
}
}
Ok(())
}- Here we split
TcpStreaminto read and write halves. - We create a stream of lines for the socket.
- We create a stream of lines for stdin.
- In the main select loop, we print the lines we receive from the server and send the lines we read from the console.
Verifying Data Structures with Kani
In this exercise we implement a remove_at method for a linked list data structure and will write a Kani harness to prove the correctness of the method.
Custom data structures (trees, graphs, etc.) in Rust often require the use of unsafe code for efficient implementation.
Working with raw pointers means that Rust’s borrow checker cannot guarantee the correctness of memory access, and Rust cannot reliably clean memory for us.
Getting a code like this right is difficult, and without Rust compiler helping us along the way we would have to rely on testing instead.
Today we will look at a linked list - the simplest data structure that relies pointer manipulation.
The example below is very limited.
The unofficial Rust tutorial - Learn Rust With Entirely Too Many Linked Lists - explores the production-ready design of a linked list from Rust Standard Library, while Implementing Vec section of The Rustonomicon explores aspects of unsafe Rust use for designing data structures in more detail.
The same principles apply to other, more complex data structures like trees, graphs, queues, etc.
After completing this exercise you will be able to
- set up Kani support for a project
- write Kani harnesses
- produce Kani playback tests
Tasks
- Create a new library project
kani-linked-list, copy the code from below - Set up Kani support for the project
- Add Kani proof for
remove_atmethod. - If Kani discovers bugs in the method, then generate playback tests.
- Fix bugs in the code.
Starting code
This is a doubly-linked list with a relatively limited API.
You can push and pop elements from both ends of the list (push_front, pop_front, and push_back, pop_back respectively), you can access the ends of the list (front[_mut] and back[_mut]), read list’s length, and iterate over it.
The test at the bottom of a snippet demonstrates most of the methods available.
#![allow(unused)]
fn main() {
use std::{fmt::Debug, ptr::NonNull, vec::IntoIter};
type Link<T> = Option<NonNull<Node<T>>>;
pub struct DoublyLinkedList<T> {
first: Link<T>,
last: Link<T>,
len: usize,
}
struct Node<T> {
prev: Link<T>,
next: Link<T>,
elem: T,
}
impl<T> Default for DoublyLinkedList<T> {
fn default() -> Self {
Self::new()
}
}
impl<T> DoublyLinkedList<T> {
pub fn new() -> Self {
Self {
first: None,
last: None,
len: 0,
}
}
pub fn push_front(&mut self, elem: T) {
unsafe {
let mut new_first = NonNull::new_unchecked(Box::into_raw(Box::new(Node {
prev: None,
next: None,
elem,
})));
match self.first {
Some(mut old_first) => {
// rewire pointers
old_first.as_mut().prev = Some(new_first);
new_first.as_mut().next = Some(old_first);
}
None => {
// make a list with a single element
self.last = Some(new_first)
}
}
self.first = Some(new_first);
self.len += 1;
}
}
pub fn push_back(&mut self, elem: T) {
unsafe {
let mut new_last = NonNull::new_unchecked(Box::into_raw(Box::new(Node {
prev: None,
next: None,
elem,
})));
match self.last {
Some(mut old_last) => {
// Put the new back before the old one
old_last.as_mut().next = Some(new_last);
new_last.as_mut().prev = Some(old_last);
}
None => {
// make a list with a single element
self.first = Some(new_last);
}
}
self.last = Some(new_last);
self.len += 1;
}
}
pub fn pop_front(&mut self) -> Option<T> {
let node = self.first?;
unsafe {
let node = Box::from_raw(node.as_ptr());
let elem = node.elem;
self.first = node.next;
match self.first {
Some(mut new_first) => {
new_first.as_mut().prev = None;
}
None => {
self.last = None;
}
}
self.len -= 1;
Some(elem)
}
}
pub fn pop_back(&mut self) -> Option<T> {
let node = self.last?;
unsafe {
let node = Box::from_raw(node.as_ptr());
let elem = node.elem;
self.last = node.prev;
match self.last {
Some(mut new_last) => {
new_last.as_mut().prev = None;
}
None => {
self.last = None;
}
}
self.len -= 1;
Some(elem)
}
}
pub fn front(&self) -> Option<&T> {
Some(unsafe { &self.first?.as_ref().elem })
}
pub fn front_mut(&mut self) -> Option<&mut T> {
Some(unsafe { &mut self.first?.as_mut().elem })
}
pub fn back(&self) -> Option<&T> {
Some(unsafe { &self.last?.as_ref().elem })
}
pub fn back_mut(&mut self) -> Option<&mut T> {
Some(unsafe { &mut self.last?.as_mut().elem })
}
pub fn len(&self) -> usize {
self.len
}
pub fn is_empty(&self) -> bool {
self.len == 0
}
pub fn iter(&self) -> IntoIter<&T> {
self.into_iter()
}
pub fn remove_at(&mut self, index: usize) -> Option<T> {
unsafe {
// find an element to remove.
// if `index` is too large this will return `None` early
let to_remove = {
let mut to_remove = self.first;
for _ in 0..index {
to_remove = to_remove?.as_mut().next;
}
Box::from_raw(to_remove?.as_ptr())
};
// connect previous and next elements together
let mut prev = to_remove.prev?;
let mut next = to_remove.next?;
prev.as_mut().next = Some(next);
next.as_mut().prev = Some(prev);
Some(to_remove.elem)
}
}
}
impl<T> Drop for DoublyLinkedList<T> {
fn drop(&mut self) {
while self.pop_front().is_some() {}
}
}
impl<T> IntoIterator for DoublyLinkedList<T> {
type Item = T;
type IntoIter = IntoIter<Self::Item>;
fn into_iter(mut self) -> Self::IntoIter {
// lazy implementation: we take all items from a linked list, put them
// into a vector, and return Vec's iterator.
let mut iter = vec![];
while let Some(elem) = self.pop_front() {
iter.push(elem);
}
iter.into_iter()
}
}
impl<'a, T> IntoIterator for &'a DoublyLinkedList<T> {
type Item = &'a T;
type IntoIter = IntoIter<Self::Item>;
fn into_iter(self) -> Self::IntoIter {
// lazy implementation: we take all items from a linked list, put them
// into a vector, and return Vec's iterator.
let mut iter: Vec<&'a T> = vec![];
let mut current = self.first;
while let Some(node) = current.map(|n| unsafe { n.as_ref() }) {
current = node.next;
iter.push(&node.elem);
}
iter.into_iter()
}
}
impl<T> FromIterator<T> for DoublyLinkedList<T> {
fn from_iter<I: IntoIterator<Item = T>>(iter: I) -> Self {
let mut list = Self::new();
for item in iter {
list.push_back(item);
}
list
}
}
// Needed for testing
impl<T> Debug for DoublyLinkedList<T>
where
T: Debug,
{
fn fmt(&self, f: &mut std::fmt::Formatter<'_>) -> std::fmt::Result {
f.debug_list().entries(self).finish()
}
}
// Needed for testing
impl<T> PartialEq for DoublyLinkedList<T>
where
T: PartialEq,
{
fn eq(&self, other: &Self) -> bool {
self.iter().eq(other.iter())
}
}
#[cfg(test)]
mod tests {
use crate::DoublyLinkedList;
#[test]
fn test_list_apis() {
let mut list = DoublyLinkedList::new();
list.push_back(2);
list.push_front(1);
list.push_back(3);
assert_eq!(format!("{list:?}"), "[1, 2, 3]");
let front = list.front();
assert_eq!(front, Some(&1));
let removed = list.remove_at(1);
assert_eq!(removed, Some(2));
assert_eq!(format!("{list:?}"), "[1, 3]");
let non_existing = list.remove_at(100);
assert_eq!(non_existing, None);
assert_eq!(format!("{list:?}"), "[1, 3]");
}
}
mod proofs {
use super::*;
// TODO: write a proof for `DoublyLinkedList::remove_at`
}
}Help
Setting up Kani
Setting up Cargo
# put this into Cargo.toml
[dev-dependencies]
kani-verifier = "0.56.0"
[dependencies]
# enables autocomplete and code inspections for `kani::*` api
kani = { version = "0.56", git = "https://github.com/model-checking/kani", tag = "kani-0.56.0", optional = true }
# removes warnings about unknown `cfg` attributes
[lints.rust]
unexpected_cfgs = { level = "warn", check-cfg = ['cfg(rust_analyzer)', 'cfg(kani)'] }
For VSCode this should be in
Rust Analyzer project settings
.vscode/settings.json{
"rust-analyzer.cargo.features": ["kani"]
}
Create
Optional: You may decide to use nightly Rust if Rust Analyzer doesn't work as expected.
rust-toolchain.toml in project’s root[toolchain]
channel = "nightly"
Writing Kani proofs
Code snippet to keep Rust Analyzer from showing macro errors for Kani
#[cfg_attr(not(rust_analyzer), cfg(kani))]
mod proofs {
use super::*;
#[cfg_attr(not(rust_analyzer), kani::proof)]
fn kani_harness() {
todo!();
}
#[test]
fn kani_concrete_playback_xxx() {
// playback code here
}
}
Other Kani help
You can make a list by making an array first using
Generating a linked list of random elements.
kani::any().
Then you can pass the array to a from_iter method.const TOTAL: usize = 10;
let items: [u32; TOTAL] = kani::any();
let mut list = DoublyLinkedList::from_iter(items.iter().copied());
assert_eq!(list.len(), TOTAL);
You can use
kani::any_where() to generate a value within a specific range.
let x: i32 = kani::any_where(|n| (1..=10).contains(n));
The exact limit is not important.
But by making the list under test shorter you can in turn safely lower the limit while letting the solver observe all possible states of the program and complete the verification.
If the proof takes a lot of time to run you can introduce the upper unwind limit for loops.
#[cfg_attr(not(rust_analyzer), kani::proof)]
#[cfg_attr(not(rust_analyzer), kani::unwind(20))]
fn long_running_proof() {
}
Building a Linux Kernel Driver using Rust
In this example we’re going to build a very basic Linux Kernel driver in Rust, compile a Linux kernel, and load the driver into it.
You will need QEMU installed and in your $PATH. If you have an AArch64 machine
(Mac with Apple Silicon, Raspberry Pi 3 or newer, etc) you should use
qemu-system-aarch64. If you have an x86-64 machine, you should use
qemu-system-x86_64. You can use the ‘wrong’ one - it’ll work just fine, but it
will go much more slowly, and we have a lot of Linux kernel to build.
Task 1 - Fetch a Debian disk image
This example uses Debian Stable ‘nocloud’ disk image. Other disk images might work but this is the one we tested.
Make yourself a work area on your machine, and download either https://cdimage.debian.org/images/cloud/bookworm/20250316-2053/debian-12-nocloud-arm64-20250316-2053.qcow2 (AArch64 aka Arm64) or https://cdimage.debian.org/images/cloud/bookworm/20250316-2053/debian-12-nocloud-amd64-20250316-2053.qcow2 (x86-64 aka AMD64)
For example:
mkdir linux-rust-demo
cd linux-rust-demo
wget https://cdimage.debian.org/images/cloud/bookworm/20250316-2053/debian-12-nocloud-arm64-20250316-2053.qcow2
(Windows users can use their favourite tool to make the folder, and a web browser to download the disk image)
Task 1a - Fetch the BIOS (AArch64 only)
If you are going to use AArch64, you’ll need a UEFI boot-loader. On macOS,
homebrew installs a copy of EDK2, which is
fine for our use-case. On my machine it was installed into
/opt/homebrew/Cellar/qemu/9.2.2/share/qemu/edk2-aarch64-code.fd. You’ll need
to have a look in your QEMU installation directory to find where your copy is.
Once you have found it, copy it to ./QEMU_EFI.fd, which is what the following
qemu-system-aarch64 command lines expect.
When emulating x86-64, QEMU uses a copy of SeaBIOS automatically.
Task 2 - Resize the disk image
If your downloads take a while, you may want to make a backup copy of the disk image, because as soon as you boot up the VM, the disk will be changed.
Then we’re going to resize the disk image because it’s too small (this applies to both the AArch64 one and the x86-64 one). We’ll deal with making the partition larger a bit later once the VM has booted.
qemu-img resize debian-12-nocloud-arm64-20250316-2053.qcow2 +32G
Task 3 - Boot it up
We’re now going to boot the VM.
For AArch64 on Apple Silicon macOS:
qemu-system-aarch64 -m 8G -M virt -cpu host -accel hvf -smp 8 -bios QEMU_EFI.fd -drive if=none,file=debian-12-nocloud-arm64-20250316-2053.qcow2,id=hd0 -device virtio-blk-device,drive=hd0 -device e1000,netdev=net0 -netdev user,id=net0,hostfwd=tcp:127.0.0.1:5555-:22 -nographic -serial telnet:localhost:4321,server,wait
For AArch64 on Arm Linux:
qemu-system-aarch64 -m 8G -M virt -cpu host -accel kvm -smp 8 -bios QEMU_EFI.fd -drive if=none,file=debian-12-nocloud-arm64-20250316-2053.qcow2,id=hd0 -device virtio-blk-device,drive=hd0 -device e1000,netdev=net0 -netdev user,id=net0,hostfwd=tcp:127.0.0.1:5555-:22 -nographic -serial telnet:localhost:4321,server,wait
AArch64 otherwise:
qemu-system-aarch64 -m 8G -M virt -cpu cortex-a53 -smp 8 -bios QEMU_EFI.fd -drive if=none,file=debian-12-nocloud-arm64-20250316-2053.qcow2,id=hd0 -device virtio-blk-device,drive=hd0 -device e1000,netdev=net0 -netdev user,id=net0,hostfwd=tcp:127.0.0.1:5555-:22 -nographic -serial telnet:localhost:4321,server,wait
For x86-64 on x86-64 Windows:
qemu-system-x86_64 -m 8G -M q35 -accel whpx -smp 8 -hda debian-12-nocloud-amd64-20250316-2053.qcow2 -device e1000,netdev=net0 -netdev user,id=net0,hostfwd=tcp:127.0.0.1:5555-:22 -nographic -serial telnet:localhost:4321,server,wait
For x86-64 on x86-64 Linux:
qemu-system-x86_64 -m 8G -M q35 -accel kvm -smp 8 -hda debian-12-nocloud-amd64-20250316-2053.qcow2 -device e1000,netdev=net0 -netdev user,id=net0,hostfwd=tcp:127.0.0.1:5555-:22 -nographic -serial telnet:localhost:4321,server,wait
x86-64 otherwise:
qemu-system-x86_64 -m 8G -M q35 -smp 8 -hda debian-12-nocloud-amd64-20250316-2053.qcow2 -device e1000,netdev=net0 -netdev user,id=net0,hostfwd=tcp:127.0.0.1:5555-:22 -nographic -serial telnet:localhost:4321,server,wait
In all cases I gave the machine 8 GiB of RAM and 8 CPU cores. You may want to tweak that to suit your needs.
Connect to your virtual machine over Telnet (you can use PuTTY, or your
favourite telnet client) on localhost:4321 You should end up at a login
prompt. The user is root and there is no password.
Task 4 - Resize the partition
The Debian image we downloaded has quite a small root partition, and we’re going to need a lot more space to build the Linux kernel. We already made the virtual disk (the QCOW file) larger, so now let’s go in and resize it the partition to use the extra space.
Inside your VM, run:
apt update
apt install fdisk
cfdisk /dev/*da
Once in cfdisk, use the arrow keys to select [ Sort ], then select the root
filesystem (the bottom one) and pick [ Resize ], then [ Write ], and
[ Quit ]. You’ll need to type yes in response to [ Write ].
Now run reboot and connect to the VM again. Running df -h should show that
/ is about 35 GiB in size - Debian’s start-up scripts automatically resized
the root filesystem to fill our newly enlarged the partition.
Task 5 - Pre-requisites
If you have an SSH key, you can install it now and start an SSH server.
apt install openssh-server
nano .ssh/authorized_keys # paste your key into this file
If you do that, you can SSH into the VM using localhost:5555 right away. You
might prefer that to whatever telnet client you were using. Or, keep using
telnet - either is fine.
Now install some more tools:
apt install build-essential libssl-dev python3 flex bison bc libncurses-dev gawk openssl libssl-dev libelf-dev libudev-dev libpci-dev libiberty-dev autoconf llvm clang lld git
curl https://sh.rustup.rs | bash
source $HOME/.cargo/env
cargo install --locked bindgen-cli
rustup component add rust-src
Task 6 - Build a kernel
Let’s grab Linux 6.14 and build it.
curl -O https://cdn.kernel.org/pub/linux/kernel/v6.x/linux-6.14.tar.xz
tar xvf linux-6.14.tar.xz
cd linux-6.14
make LLVM=1 rustavailable
make LLVM=1 defconfig
make LLVM=1 menuconfig # General setup / [*] Rust support
In the menuconfig interface you will need to enter General Support and
scroll down to Rust support. Press Y to enable Rust support. Then use the
arrow keys to select < Exit > and < Exit > again, then < Yes > to save.
Now we can build and install our kernel.
make LLVM=1 -j8
make LLVM=1 modules_install
make LLVM=1 install
reboot
This takes around 12 minutes or so on a fast laptop (using Hypervisor acceleration). It’ll be much longer if you’re on the ‘opposite’ architecture and are having to fully emulate the guest processor.
Task 7 - Build a kernel module
OK! Now we have Linux 6.14 with Rust support enabled. Let’s build an out-of-tree kernel module.
git clone https://github.com/Rust-for-Linux/rust-out-of-tree-module
cd rust-out-of-tree-module
git checkout 15de8569df46e16f4940b52c91ee8f6bfbe5ab22
make KDIR=../linux-6.14 LLVM=1
The kernel module has been compiled as rust_out_of_tree.ko. Let’s load it.
insmod ./rust_out_of_tree.ko
As it loaded, you should see a message from the kernel - if you’re on SSH, check
the telnet window. If you don’t have telnet connected, you can review the kernel
logs with dmesg.
root@localhost:~/rust-out-of-tree-module# insmod rust_out_of_tree.ko
[ 13.933513] rust_out_of_tree: loading out-of-tree module taints kernel.
[ 13.938155] rust_out_of_tree: Rust out-of-tree sample (init)
root@localhost:~/rust-out-of-tree-module# dmesg
...
[ 13.933513] rust_out_of_tree: loading out-of-tree module taints kernel.
[ 13.938155] rust_out_of_tree: Rust out-of-tree sample (init)
root@localhost:~/rust-out-of-tree-module#
Now let’s unload it.
rmmod rust_out_of_tree
Again, you should see some output:
root@localhost:~/rust-out-of-tree-module# rmmod rust_out_of_tree
[ 72.677287] rust_out_of_tree: My numbers are [72, 108, 200]
[ 72.677835] rust_out_of_tree: Rust out-of-tree sample (exit)
root@localhost:~/rust-out-of-tree-module# dmesg
...
[ 13.933513] rust_out_of_tree: loading out-of-tree module taints kernel.
[ 13.938155] rust_out_of_tree: Rust out-of-tree sample (init)
[ 72.677287] rust_out_of_tree: My numbers are [72, 108, 200]
[ 72.677835] rust_out_of_tree: Rust out-of-tree sample (exit)
root@localhost:~/rust-out-of-tree-module#
Task 8 - Create a device
As of Linux 6.14, Rust for Linux has Rust APIs for:
- Block Devices
- Miscellaneous Devices
- Network Devices
A Miscellaneous Device has an entry like /dev/foobar and we can open it,
close it, and send it ioctl requests.
Looking at the documentation for the MiscDevice::register method we can see
that we get an opaque object that implements PinInit rather than a concrete
type. So, we’re going to need to make a bunch of changes, step by step.
First, let’s remove that example Vec and hold MiscDeviceRegistration
instead. We mark the struct with #[pin_data(PinnedDrop)] to promise that we’re
not going to be moving things around in memory whilst the module is loaded, and
mark the _miscdev field with #[pin]:
#[pin_data(PinnedDrop)]
struct RustOutOfTree {
#[pin]
_miscdev: kernel::miscdevice::MiscDeviceRegistration<RustOutOfTreeDevice>,
}Now instead of implementing kernel::Module, let’s implement kernel::InPlaceModule:
impl kernel::InPlaceModule for RustOutOfTree {
fn init(_module: &'static ThisModule) -> impl PinInit<Self, Error> {
pr_info!("Rust out-of-tree sample (init)\n");
let options = kernel::miscdevice::MiscDeviceOptions {
name: kernel::c_str!("rust-misc-device"),
};
try_pin_init!(Self {
_miscdev <- kernel::miscdevice::MiscDeviceRegistration::register(options),
})
}
}Instead of a plain Result we’re returning something that implements PinInit.
The try_pin_init! macro will do this for us. The name in our
kernel::miscdevice::MiscDeviceOptions sets the name of our device in /dev.
Pick something else if you like!
We need to adjust our Drop impl, to deal with our newly pinned data structure.
#[pinned_drop]
impl PinnedDrop for RustOutOfTree {
fn drop(self: Pin<&mut Self>) {
pr_info!("Rust out-of-tree sample (exit)\n");
}
}(We’ve also removed the bit that prints the Vec we removed).
Finally, let’s make the RustOutOfTreeDevice we referenced earlier in our
RustOutOfTree structure. It’s as basic as we can get away with.
struct RustOutOfTreeDevice {}
#[vtable]
impl kernel::miscdevice::MiscDevice for RustOutOfTreeDevice {
type Ptr = Pin<KBox<Self>>;
fn open(
_file: &kernel::fs::File,
_misc: &kernel::miscdevice::MiscDeviceRegistration<Self>,
) -> Result<Pin<KBox<Self>>> {
return Err(ENOTTY);
}
}Our full file looks like this
// SPDX-License-Identifier: GPL-2.0
//! Rust out-of-tree sample
use kernel::prelude::*;
module! {
type: RustOutOfTree,
name: "rust_out_of_tree",
author: "Rust for Linux Contributors",
description: "Rust out-of-tree sample",
license: "GPL",
}
#[pin_data(PinnedDrop)]
struct RustOutOfTree {
#[pin]
_miscdev: kernel::miscdevice::MiscDeviceRegistration<RustOutOfTreeDevice>,
}
impl kernel::InPlaceModule for RustOutOfTree {
fn init(_module: &'static ThisModule) -> impl PinInit<Self, Error> {
pr_info!("Rust out-of-tree sample (init)\n");
let options = kernel::miscdevice::MiscDeviceOptions {
name: kernel::c_str!("rust-misc-device"),
};
try_pin_init!(Self {
_miscdev <- kernel::miscdevice::MiscDeviceRegistration::register(options),
})
}
}
#[pinned_drop]
impl PinnedDrop for RustOutOfTree {
fn drop(self: Pin<&mut Self>) {
pr_info!("Rust out-of-tree sample (exit)\n");
}
}
struct RustOutOfTreeDevice {}
#[vtable]
impl kernel::miscdevice::MiscDevice for RustOutOfTreeDevice {
type Ptr = Pin<KBox<Self>>;
fn open(
_file: &kernel::fs::File,
_misc: &kernel::miscdevice::MiscDeviceRegistration<Self>,
) -> Result<Pin<KBox<Self>>> {
return Err(ENOTTY);
}
}Let’s load it and see if we get a device:
$ make KDIR=../linux-6.14 LLVM=1
$ insmod ./rust_out_of_tree.ko
[ 2337.507487] rust_out_of_tree: Rust out-of-tree sample (init)
$ ls /dev/rust*
crw------- 1 root root 10, 124 Apr 2 16:29 /dev/rust-misc-device
$ rmmod rust_out_of_tree
[ 2345.938810] rust_out_of_tree: Rust out-of-tree sample (exit)
Nice, we got a device!
Task 9 - Implement open
Let’s implement the open function for our RustOutOfTreeDevice.
Our RustOutOfTreeDevice will need to hold onto a reference to our open Device:
#[pin_data]
struct RustOutOfTreeDevice {
dev: kernel::types::ARef<kernel::device::Device>,
}Yes, more pinning was required. The clue was the return type of the open function in the MiscDevice trait: Result<Pin<KBox<Self>>>.
Let’s re-write that open function to actually open our device.
#[vtable]
impl kernel::miscdevice::MiscDevice for RustOutOfTreeDevice {
type Ptr = Pin<KBox<Self>>;
fn open(
file: &kernel::fs::File,
misc: &kernel::miscdevice::MiscDeviceRegistration<Self>,
) -> Result<Pin<KBox<Self>>> {
let dev = kernel::types::ARef::from(misc.device());
dev_info!(
dev,
"Opening Rust Misc Device Sample (uid = {})\n",
file.cred().euid().into_uid_in_current_ns()
);
KBox::try_pin_init(
try_pin_init! {
RustOutOfTreeDevice {
dev: dev,
}
},
GFP_KERNEL,
)
}
}Our full file looks like this:
// SPDX-License-Identifier: GPL-2.0
//! Rust out-of-tree sample
use kernel::prelude::*;
module! {
type: RustOutOfTree,
name: "rust_out_of_tree",
author: "Rust for Linux Contributors",
description: "Rust out-of-tree sample",
license: "GPL",
}
#[pin_data(PinnedDrop)]
struct RustOutOfTree {
#[pin]
_miscdev: kernel::miscdevice::MiscDeviceRegistration<RustOutOfTreeDevice>,
}
impl kernel::InPlaceModule for RustOutOfTree {
fn init(_module: &'static ThisModule) -> impl PinInit<Self, Error> {
pr_info!("Rust out-of-tree sample (init)\n");
let options = kernel::miscdevice::MiscDeviceOptions {
name: kernel::c_str!("rust-misc-device"),
};
try_pin_init!(Self {
_miscdev <- kernel::miscdevice::MiscDeviceRegistration::register(options),
})
}
}
#[pinned_drop]
impl PinnedDrop for RustOutOfTree {
fn drop(self: Pin<&mut Self>) {
pr_info!("Rust out-of-tree sample (exit)\n");
}
}
#[pin_data]
struct RustOutOfTreeDevice {
dev: kernel::types::ARef<kernel::device::Device>,
}
#[vtable]
impl kernel::miscdevice::MiscDevice for RustOutOfTreeDevice {
type Ptr = Pin<KBox<Self>>;
fn open(
file: &kernel::fs::File,
misc: &kernel::miscdevice::MiscDeviceRegistration<Self>,
) -> Result<Pin<KBox<Self>>> {
let dev = kernel::types::ARef::from(misc.device());
dev_info!(
dev,
"Opening Rust Misc Device Sample (uid = {})\n",
file.cred().euid().into_uid_in_current_ns()
);
KBox::try_pin_init(
try_pin_init! {
RustOutOfTreeDevice {
dev: dev,
}
},
GFP_KERNEL,
)
}
}Now we should be able to see a log when we try and open our device.
$ make KDIR=../linux-6.14 LLVM=1
$ insmod ./rust_out_of_tree.ko
[ 3918.696311] rust_out_of_tree: Rust out-of-tree sample (init)
$ cat /dev/rust-misc-device
cat: /dev/rust-misc-device: Invalid argument
[ 3990.836103] misc rust-misc-device: Opening Rust Misc Device Sample (uid = 0)
Great, we can see that the device has been opened by cat. As of Linux 6.14
there’s no support for Read operations - only ioctl operations - so cat gets
an error from the Kernel. That’s expected.
Task 10 - implement ioctl
You’ve got the hang of this now, so as a bonus exercise, why not implement
ioctl. See
https://rust.docs.kernel.org/kernel/miscdevice/trait.MiscDevice.html for
details.
You’ll need some IOCTL numbers to use. Try creating a “Hello” ioctl, with no
argument (no data read and no data written):
const RUST_MISC_DEV_HELLO: u32 = _IO('|' as u32, 0x80);I chose | as the ioctl type for Miscellaneous Devices, because that’s what
is in the example code. If you need help with this step, that’s a great place
to look.
To send an ioctl to your device, you can use this Rust program. You’ll need to
put it in a package (cargo new --bin openfile) and add the nix crate with
ioctl feature enabled (cargo add -F ioctl nix).
use std::os::fd::AsRawFd;
const HELLO: u8 = 0x80;
nix::ioctl_none!(hello_ioctl, '|', HELLO);
fn main() -> Result<(), Box<dyn std::error::Error>> {
let f = std::fs::File::open("/dev/rust-misc-device")?;
let fd = f.as_raw_fd();
let result = unsafe { hello_ioctl(fd) };
println!("ioctl returned {:?}", result);
Ok(())
}Or you could try and write the equivalent in Rust (you’ll probably need the
nix crate and the libc crate).
Here's an example `ioctl` method if you need one
fn ioctl(
me: Pin<&RustOutOfTreeDevice>,
_file: &kernel::fs::File,
cmd: u32,
arg: usize,
) -> Result<isize> {
dev_info!(me.dev, "IOCTLing Rust Out Of Tree Device\n");
let size = kernel::ioctl::_IOC_SIZE(cmd);
match cmd {
RUST_MISC_DEV_HELLO => {
dev_info!(me.dev, "-> hello received (size {}, arg {})\n", size, arg);
Ok(100)
}
_ => {
dev_err!(me.dev, "-> IOCTL not recognised: {}\n", cmd);
Err(ENOTTY)
}
}
}Here’s what your output might look like if we run that example:
$ make KDIR=../linux-6.14 LLVM=1
$ insmod ./rust_out_of_tree.ko
[12147.696311] rust_out_of_tree: Rust out-of-tree sample (init)
$ cd ../openfile
$ cargo run
Finished `dev` profile [unoptimized + debuginfo] target(s) in 0.01s
Running `target/debug/openfile`
ioctl returned Ok(100)
$ dmesg
[12150.540427] misc rust-misc-device: Opening Rust Misc Device Sample (uid = 0)
[12150.541318] misc rust-misc-device: IOCTLing Rust Misc Device Sample
[12150.541606] misc rust-misc-device: -> hello received (size 0, arg 0)
Task 11 - Keep going!
OK! If you still want more, try implementing ‘read’ and ‘write’ ioctls, so you
can communicate with your driver. Or look at the Kernel mailing list for the
patches that will let you do ordinary read and write syscalls on your
device, rather than just ioctls. Happy kernel hacking in Rust!
nRF52 Preparation
This chapter contains the introduction and preparation for the nRF52-based exercises.
Required Hardware
- nRF52840 Development Kit (DK)
- nRF52840 Dongle
- 2 micro-USB cables
- ❗️ make sure you’re using micro usb cables which can transmit data (some are charging-only; these are not suitable for these exercises)
- 2 corresponding available USB ports on your laptop / PC (you can use a USB hub if you don’t have enough ports)
In our nRF52-focussed exercises we will use both the nRF52840 Development Kit (DK) and the nRF52840 Dongle. We’ll mainly develop programs for the DK and use the Dongle to assist with some exercises.
nRF52 Dongle
The dongle chapter will walk you through the setup of the dongle.
nRF52-DK Board
The DK board chapter will walk you through the setup of the board.
Starter code
Project templates and starter code for our trainings can be found at in this repo.
Dongle preparation
This chapter prepares the dongle board, which is the smaller of your two development boards based on the nRF52840 chip.
The board has the form factor of a USB stick and can be directly connected to one of the USB ports of your PC / laptop.
Preparing some software
First of all, we want to prepare some software we need for displaying that our computer
detects the dongle. We have prepared a tool for this which is also cross-platform but using
this tool requires the cargo package manager. If you have not
done so already, go to the Rust website which should specify
how to install Rust for your operating system. Every Rust installation also comes with an installation of cargo.
After you have done this, you can use the following command in the terminal of your choice to check
your cargo installation:
cargo version
Linux specific - Configure USB Device access for non-root users
We have to update the udev rules for proper permissions.
To access the USB devices as a non-root user, follow these steps:
-
As root, create
/etc/udev/rules.d/50-ferrous-training.ruleswith the following contents:# udev rules to allow access to USB devices as a non-root user # nRF52840 Dongle in bootloader mode ATTRS{idVendor}=="1915", ATTRS{idProduct}=="521f", TAG+="uaccess" # nRF52840 Dongle applications ATTRS{idVendor}=="1209", TAG+="uaccess" # nRF52840 Development Kit ATTRS{idVendor}=="1366", ENV{ID_MM_DEVICE_IGNORE}="1", TAG+="uaccess" -
Run the following command to put the new udev rules into effect
sudo udevadm control --reload-rules sudo udevadm trigger
If you plan to use probe-rs for other microcontrollers and setups, it is strongly recommended
to follow the Linux specific steps on the probe-rs website
which involve downloading a generic rules file, manually placing it in /etc/udev/rules.d and then
running step 2 above.
Connecting the Dongle
Connect the Dongle to your PC/laptop. Its red LED should start oscillating in intensity.
Now, you can use the command cargo xtask usb-list to see something like this:
(...)
Bus 001 Device 011: ID 1915:521f <- nRF52840 Dongle (in bootloader mode)
(...)
Updating the firmware
The Dongle does not contain an on-board debugger, like the larger DK board, so we cannot use
flashing tools like probe-rs to write programs into it. Instead, the Dongle’s stock firmware
comes with a bootloader.
When put in bootloader mode the Dongle will run a bootloader program instead of the last application that was flashed into it. This bootloader program will make the Dongle show up as a USB CDC ACM device (AKA Serial over USB device) that accepts new application images over this interface. We’ll use the nrfdfu tool to communicate with the bootloader-mode Dongle and flash new images into it.
nrfdfu is a Rust application which is published on the crates-io Rust package registry.
This means that we can install it using cargo:
cargo install nrfdfu
✅ Connect the Dongle to your computer. Put the Dongle in bootloader mode by pressing its reset button.
💬 How to find the buttons on the Dongle: Put the Dongle in front of you, so that the side with the parts mounted on faces up. Rotate it, so that the narrower part of the board, the surface USB connector, faces away from you. The Dongle has two buttons. They are next to each other in the lower left corner of the Dongle. The reset button (RESET) is mounted sideways, it’s square shaped button faces you. Further away from you is the round-ish user button (SW1), which faces up.
When the Dongle is in bootloader mode its red LED will pulsate. The Dongle will also appear as a USB CDC ACM device with vendor ID 0x1915 and product ID 0x521f.
Now that the device is in bootloader mode, you need to get the Dongle Firmware.
❗️ This firmware will not be found in the git checkout - you need to get it from https://github.com/ferrous-systems/rust-exercises/releases.
You can download the individual firmware files from the releases
page. You need dongle-fw.
✅ Change to the directory where the dongle-fw file is located and run:
nrfdfu ./dongle-fw
Expected output:
[INFO nrfdfu] Sending init packet...
[INFO nrfdfu] Sending firmware image of size 37328...
[INFO nrfdfu] Done.
After the device has been programmed it will automatically reset and start running the new application.
🔎 Alternatively, you can also use nordic’s own nrfutil tool to convert a .hex file and flash it for you, among many other things nrfutil is a very powerful tool, but also unstable at times, which is why we replaced the parts we needed from it with nrfdfu.
🔎 The dongle-fw application will make the Dongle enumerate itself as a CDC ACM device.
✅ Run cargo xtask usb-list to see the newly enumerated Dongle in the output:
❯ cargo xtask usb-list
(...)
Bus 001 Device 009: ID 1209:0003 <- nRF52840 Dongle (dongle-fw)
(...)
The dongle app will log messages over the USB interface. To display these messages on the host we have provided a cross-platform tool: cargo xtask serial-term.
❗ Do not use serial terminal emulators like minicom or screen. They use the USB TTY ACM interface in a slightly different manner and may result in data loss.
✅ Run cargo xtask serial-term from the root of the extracted tarball / git checkout. It shows you the logging output the Dongle is sending on its serial interface to your computer. This helps you monitor what’s going on at the Dongle and debug connection issues. Start with the Dongle unplugged and you should see the following output:
$ cargo xtask serial-term
Finished dev [unoptimized + debuginfo] target(s) in 0.02s
Running `xtask/target/debug/xtask serial-term`
(waiting for the Dongle to be connected)
(..)
rx=0, err=0, ch=20, app=dongle-fw
(..)
This line is printed by the dongle app on boot. It contains the device ID of the dongle, a 64-bit unique identifier (so everyone will see a different number); the radio channel that the device will use to communicate; and the transmission power of the radio in dBm.
If you don’t get any output from cargo xtask serial-term check the USB dongle troubleshooting section.
The dongle-fw has 2 different modes, a puzzle mode and a loopback mode. The LED will glow green in
the loopback mode, and blue in the puzzle mode. You can use the larger user button to switch between
modes. We will need the loopback mode first, so make sure that the LED is glowing green, and press
the button to switch to the correct mode if necessary.
Interference
At this point you should not get more output from cargo xtask serial-term.
❗If you get “received N bytes” lines in output like this:
$ cargo xtask serial-term
rx=0, err=0, ch=20, app=dongle-fw
(..)
received 7 bytes (CRC=Ok(0x2459), LQI=0)
received 5 bytes (CRC=Ok(0xdad9), LQI=0)
received 6 bytes (CRC=Ok(0x72bb), LQI=0)
That means the device is observing interference traffic, likely from 2.4 GHz Zigbee, WiFi or Bluetooth. In this scenario you should switch the listening channel to one where you don’t observe interference. Use the cargo xtask change-channel tool to do this in a second window. The tool takes a single argument: the new listening channel which must be in the range 11-26.
$ cargo xtask change-channel 11
requested channel change to channel 11
Then you should see new output from cargo xtask serial-term:
rx=0, err=0, ch=20, app=dongle-fw
(..)
now listening on channel 11
Leave the Dongle connected and cargo xtask serial-term running. Now we’ll switch back to the
Development Kit. Note that if you remove and re-insert the dongle, it goes back to its default channel of 20.
You will also need to restart cargo xtask serial-term.
Continuing with the board
We will continue with setting up the larger DK board now.
Board preparation
This is the nRF52840 Development Kit (DK) board.
The board has two USB ports: J2 and J3 and an on-board J-Link programmer / debugger. USB port J3 is the nRF52840’s USB port. Connect the Development Kit to your computer using the J2 port. You can also refer to the image below to see the location of the different components on the board.
The development board actually has two chips. One is the nRF52840 target chip, and the other contains a special firmware which transforms it into a SEGGER J-Link debugger probe. Your computer will communicate via USB with the J-Link, which will in turn use the SWD protocol to interface with the target chip. All of this avoids the need for an external probe.
💬 These directions assume you are holding the board “horizontally” with components (switches, buttons and pins) facing up. In this position, rotate the board, so that its convex shaped short side faces right. You’ll find one USB connector (J2) on the left edge, another USB connector (J3) on the bottom edge and 4 buttons on the bottom right corner.
The board has several switches to configure its behavior. The out of the box configuration is the one we want. If the above instructions didn’t work for you, check the position of the following switches:
- SW6 is set to the DEFAULT position (to the right - nRF = DEFAULT).
- SW7 (protected by Kapton tape) is set to the Def. position (to the right - TRACE = Def.).
- SW8 is set to the ON (to the left) position (Power = ON)
- SW9 is set to the VDD position (center - nRF power source = VDD)
- SW10 (protected by Kapton tape) is set to the OFF position (to the left - VEXT -> nRF = OFF).
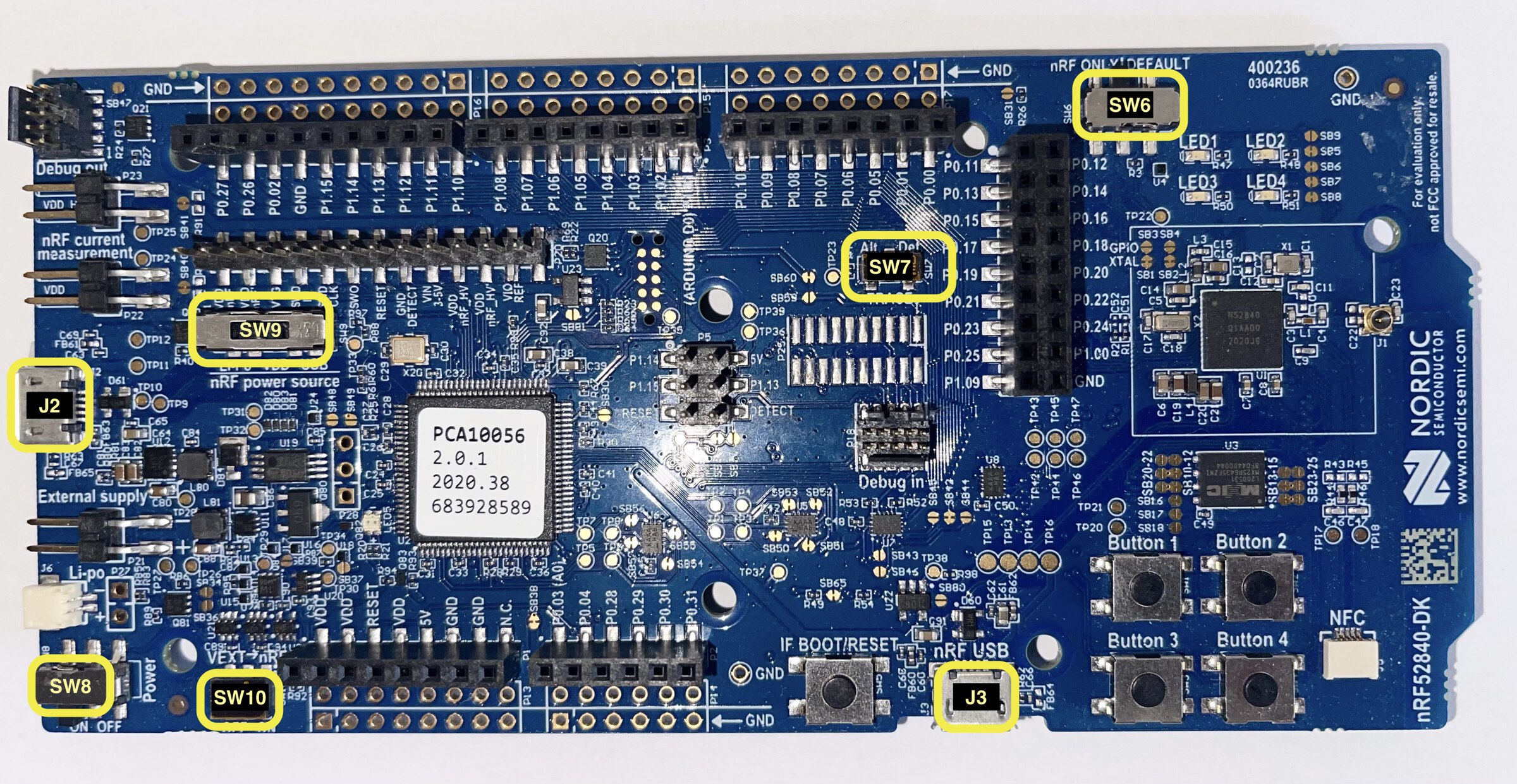
Detecting the board
We installed cargo when we set up the dongle, so we are able to use cargo xtask usb-list
to see whether the DK board is recognized. You should see something like this:
❯ cargo xtask usb-list
Finished `dev` profile [unoptimized + debuginfo] target(s) in 0.10s
Running `xtask/target/debug/xtask usb-list`
Bus 003 Device 010: ID 1366:1061 <- J-Link on the nRF52840 Development Kit
The nRF52840 chip
Both development boards have an nRF52840 microcontroller. Here are some details that are relevant to these exercises:
- Single core ARM Cortex-M4 processor clocked at 64 MHz
- 1 MB of Flash (at address
0x0000_0000) - 256 KB of RAM (at address
0x2000_0000) - IEEE 802.15.4 and BLE (Bluetooth Low Energy) compatible radio
- USB controller (device function)
Preparing the flashing tool
To verify that our on-board J-Link is working properly and our board is ready for the following exercises, we will flash a small hello world application onto it.
We are going to use a debugging tool built with Rust which is well integrated into the Embedded
Rust ecosystem called probe-rs. The installation page
specifies how you can install this tool on your operating system. If you are on Windows and have
problems executing the Windows PowerShell script, you can also download pre-built binaries from
the releases page. You can then place these pre-built
binaries at some location and add the location to your system PATH if it isn’t there already.
You can use
probe-rs --version
to verify that you have probe-rs installed and available in your terminal.
Now, you might still have to do some operating system specific setup so that probe-rs can talk
to the on-board J-Link probe we saw earlier when we ran cargo xtask usb-list.
The probe-rs setup page also specifies
these steps.
Linux specific
You need the same udev rules that were setup earlier.
Windows specific
No Windows specific steps should be necessary on more recent boards. If you have an older board
and probe-rs does not work properly, refer to the troubleshooting for Windows chapter.
Flashing a test application
probe-rs is installed and you performed the OS specific steps so it can talk to our
MCU.
We provide a simple pre-built blinky app that can be used to quickly verify that this flashing
process works properly. You can download the blinky ELF file from the
release page.
Then, you can use the following command to flash the blinky binary to the board:
probe-rs run --chip nRF52840_xxAA --allow-erase-all ./blinky
You now should now see the LED1 blinking with a frequency of 1 second.
References and Resources
Radio Project
- nRF52840 Product Specification
- The Embedded Rust Book is a great learning resource, especially the Concurrency chapter.
- If you are looking to write an interrupt handler, look at the
#[interrupt]attribute. All interrupts implemented by the nrf52840 HAL are listed innrf52840-pac/src/lib.rs. It is also recommended that you work through the USB exercise to learn about RTIC.
USB Project
Tooltips
Besides the ones covered in this training, there are many more tools that make embedded development easier. Here, we’d like to introduce you to some of these tools and encourage you to play around with them and adopt them if you find them helpful!
cargo-bloat
cargo-bloat is a useful tool to analyze the binary size of a program. You can install it through cargo:
$ cargo install cargo-bloat
(..)
Installed package `cargo-bloat v0.10.0` (..)
Let’s inspect our radio exercises’s hello program with it:
$ cd nrf52-code/radio-app
$ cargo bloat --bin hello --release
File .text Size Crate Name
0.7% 13.5% 1.3KiB std <char as core::fmt::Debug>::fmt
0.5% 9.6% 928B hello hello::__cortex_m_rt_main
0.4% 8.4% 804B std core::str::slice_error_fail
0.4% 8.0% 768B std core::fmt::Formatter::pad
0.3% 6.4% 614B std core::fmt::num::<impl core::fmt::Debug for usize>::fmt
(..)
5.1% 100.0% 9.4KiB .text section size, the file size is 184.5KiB
This breaks down the size of the .text section by function. This breakdown can be used to
identify the largest functions in the program; those could then be modified to make them smaller.
Please note that the output might change between compiler and dependency versions and you might
not get the exact output shown above.
Using probe-rs VS Code plugin
The probe-rs team have produced a VS Code plugin. It uses the probe-rs library to talk directly to your supported Debug Probe (J-Link, ST-Link, CMSIS-DAP, or whatever) and supports both single-stepping and defmt logging.
Install the probe-rs.probe-rs-debugger extension in VS Studio, and when you open the nrf52-code/radio-app folder in VS Code, the .vscode/launch.json file we supply should give you a Run with probe-rs entry in the Run and Debug panel. Press the green triangle and it will build the code, flash device, set up defmt and then start the chip running. You can set breakpoints in the usual way (by clicking to the left of your source code to place a red dot).
Using gdb and probe-rs
The CLI probe-rs command has an option for opening a GDB server. We have found the command-line version of GDB to be a little buggy though, so the VS Code plugin above is preferred.
$ probe-rs gdb --chip nRF52840_xxAA
# In another window
$ arm-none-eabi-gdb ./target/thumbv7em-none-eabihf/debug/blinky
gdb> target extended-remote :1337
gdb> monitor reset halt
gdb> break main
gdb> continue
Breakpoint 1, blinky::__cortex_m_rt_main_trampoline () at src/bin/blinky.rs:10
Using gdb and openocd
You can also debug a Rust program using gdb and openocd. However, this isn’t recommended because it requires significant extra set-up, especially to get the RTT data piped out of a socket and into defmt-print (this function is built into a probe-rs).
If you are familiar with OpenOCD and GDB, and want to try this anyway, then do pretty much what you would do with a C program.
The only change is that if you want defmt output, you need these OpenOCD commands to enable RTT:
rtt setup 0x20000000 0x40000 "SEGGER RTT"
rtt start
rtt server start 9090 0
You can then use nc to connect to localhost:9090, and pipe the output into defmt-print:
nc localhost:9090 | defmt-print ./target/thumbv7em-none-eabihf/debug/blinky
Troubleshooting
If you have issues with any of the tools used in this training check out the sections in this chapter.
cargo-size is not working
$ cargo size --bin hello
Failed to execute tool: size
No such file or directory (os error 2)
llvm-tools is not installed. Install it with rustup component add llvm-tools
▶ Run button, type annotations and syntax highlighting missing / Rust-Analyzer is not working
If you get no type annotations, no “Run” button and no syntax highlighting this means Rust-Analyzer isn’t at work yet.
Try the following:
-
add something to the file you’re currently looking at, delete it again and save. This triggers a re-run. (you can also
touchthe file in question) -
check that you have a single folder open in VS code; this is different from a single-folder VS code workspace. First close all the currently open folders then open a single folder using the ‘File > Open Folder’ menu. The open folder should be the
nrf52-code/radio-appfolder for the Radio exercise, thenrf52-code/hal-appfolder for the HAL exercise, or thenrf52-code/usb-appfolder for the USB exercise. -
use the latest version of the Rust-Analyzer plugin. If you get a prompt to update the Rust-Analyzer extension when you start VS code accept it. You may also get a prompt about updating the Rust-Analayzer binary; accept that one too. The extension should restart automatically after the update. If it doesn’t then close and re-open VS code.
-
You may need to wait a little while Rust-Analyzer analyzes all the crates in the dependency graph. Then you may need to modify and save the currently open file to force Rust-Analyzer to analyze it.
Making probe-rs work on Windows
If probe-rs does not work on Windows, you might have to re-configure the firmware running on the on-board J-Link first
to use WinUSB. The SEGGER website specifies
how you can do this using the J-Link Software Package.
Alternatively, you can also install the Zadig tool and use it to re-configure WinUSB as the driver for the probe.
cargo build fails to link
If you have configured Cargo to use sccache then you’ll need to disable sccache support. Unset the RUSTC_WRAPPER variable in your environment before opening VS code. Run cargo clean from the Cargo workspace you are working from (nrf52-code/radio-app or nrf52-code/usb-app). Then open VS code.
If you are on Windows and get linking errors like LNK1201: error writing to program database, then something in your target folder has become corrupt. A cargo clean should fix it.
Dongle USB functionality is not working
NOTE: this section only applies to the Radio exercise
If you don’t get any output from cargo xtask serial-term it could just have been that first line got lost when re-enumerating the device from bootloader mode to the loopback application.
Run cargo xtask serial-term in one console window. Leave this window open.
In another window, run these two commands:
$ cargo xtask change-channel 20
requested channel change to channel 20
$ cargo xtask change-channel 20
requested channel change to channel 20
If you get two lines of output in cargo xtask serial-term like this, you are good to go:
$ cargo xtask serial-term
now listening on channel 20
now listening on channel 20
Return to the “Interference” section.
🔎 cargo xtask serial-term shows you the log output that the Dongle is sending to your computer via the serial interface (not over the wireless network!). After you’ve ran cargo xtask change-channel, it tells you that it is now listening for network traffic on channel 20. This is helpful for debugging, but not mission-critical.
If you only get one line of output then your OS may be losing some serial data – we have seen this behavior on some macOS machines. You will still be able to work through the exercises but will miss log data every now and then. Return to the “Interference” section.
If you don’t get any output from cargo xtask serial-term and/or the cargo xtask change-channel command fails then the Dongle’s USB functionality is not working correctly. In this case you should ask your trainer for a custom firmware which has a fixed radio channel allocated. This means that when you program the Development Kit to send data to the Dongle, you need to ensure they are communicating on the same channel by setting
/// make sure to pass the channel number of the loopback-nousb* program you
/// received from the trainer
radio.set_channel(Channel::_21);Note that the loopback-nousb* programs do not send you any logs via cargo xtask serial-term for debugging but you will be able do the exercises nonetheless. For your debugging convenience, the Dongle will toggle the state of its green LED when it receives a packet. When you’re done, return to the “Interference” section.
cargo run errors
You may get one of these errors:
- “Access denied (insufficient permissions)” (seen on macOS)
- “USB error while taking control over USB device: Resource busy” (seen on Linux)
$ cargo run --bin usb-4
Running `probe-rs run --chip nRF52840_xxAA target/thumbv7em-none-eabihf/debug/usb-4`
Error: An error specific to a probe type occured: USB error while taking control over USB device: Access denied (insufficient permissions)
Caused by:
USB error while taking control over USB device: Access denied (insufficient permissions)
$ cargo run --bin usb-4
Running `probe-rs run --chip nRF52840_xxAA target/thumbv7em-none-eabihf/debug/usb-4`
Error: An error specific to a probe type occured: USB error while taking control over USB device: Resource busy
Caused by:
USB error while taking control over USB device: Resource busy
All of them have the same root issue: You have another instance of the cargo run process running.
It is not possible to have two or more instances of cargo run running. Terminate the old instance before executing cargo run. If you are using VS Code click the garbage icon (“Kill Terminal”) on the top right corner of the terminal output window (located on the bottom of the screen).
no probe was found error
You may encounter this error:
Running probe-rs run --chip nRF52840_xxAA target/thumbv7em-none-eabihf/debug/hello
Error: no probe was found
- It may be caused by the micro-USB cable plugged on the long side of the board, instead of the short side.
- Check that the board is powered on.
- Check that your cable is a data cable and not power-only.
location info is incomplete error
Problem: Using cargo run –bin hello from within the nrf52-code/radio-app folder finishes compiling and starts up probe-rs. But then the following error is returned:
Running `probe-rs run --chip nRF52840_xxAA target/thumbv7em-none-eabihf/debug/hello`
(HOST) WARN (BUG) location info is incomplete; it will be omitted from the output
Error: AP ApAddress { dp: Default, ap: 0 } is not a memory AP
The LED5 next to the FTDI chip on the DK goes off for a split second but no program is flashed.
Solution: It seems like my nRF52840-DK was shipped with the MCU in some kind of protected state. Using nrfjprog from the nRF command line tools you can run nrfjprog –recover which makes the MCU exit this state and programming etc. using probe-rs works fine again.
Untested: using nrf-recover may also work.
nRF52 Radio Exercise
In this exercise you’ll get familiar with:
- the structure of embedded Rust programs,
- the existing embedded Rust tooling, and
- embedded application development using a Board Support Package (BSP).
To put these concepts in practice you’ll write applications that use the radio functionality of the nRF52840 microcontroller.
Parts of an Embedded Program
We will look at the elements that distinguish an embedded Rust program from a desktop program.
✅ Open the nrf52-code/radio-app folder in VS Code.
# or use "File > Open Folder" in VS Code
code nrf52-code/radio-app
✅ Then open the nrf52-code/radio-app/src/bin/hello.rs file.
Attributes
In the file, you will find the following attributes:
#![no_std]
The #![no_std] language attribute indicates that the program will not make use of the standard library, the std crate. Instead it will use the core library, a subset of the standard library that does not depend on an underlying operating system (OS).
#![no_main]
The #![no_main] language attribute indicates that the program will use a custom entry point instead of the default fn main() { .. } one.
#[entry]
The #[entry] macro attribute marks the custom entry point of the program. The entry point must be a divergent function whose return type is the never type !. The function is not allowed to return; therefore the program is not allowed to terminate. The macro comes from the cortex-m-rt crate and is not part of the Rust language.
Building an Embedded Program
The default in a Cargo project is to compile for the host (native compilation). The nrf52-code/radio-app project has been configured for cross compilation to the ARM Cortex-M4 architecture. This configuration can be seen in the Cargo configuration file (.cargo/config):
# .cargo/config
[build]
target = "thumbv7em-none-eabihf" # = ARM Cortex-M4
The target thumbv7em-none-eabihf can be broken down as:
thumbv7em- we generate instructions for the Armv7E-M architecture running in Thumb-2 mode (actually the only supported mode on this architecture)none- there is no Operating Systemeabihf- use the ARM Embedded Application Binary Interface, with Hard Float supportf32andf64can be passed to functions in FPU registers (likeS0), instead of in integer registers (likeR0)
✅ Inside the folder nrf52-code/radio-app, use the following command to cross compile the program to the ARM Cortex-M4 architecture.
cargo build --bin hello
It should be noted that building the application for this target also requires the thumbv7em-none-eabihf
target. Normally, you would have to add this target to cargo by using
rustup target add thumbv7em-none-eabihf, but we provide a rust-toolchain.toml that is used to
cargo to determine which toolchains should be installed automatically.
The output of the compilation process will be an ELF (Executable and Linkable Format) file. The file will be placed in the target/thumbv7em-none-eabihf directory.
✅ Run $ file target/thumbv7em-none-eabihf/debug/hello and compare if your output is as expected.
Expected output:
$ file target/thumbv7em-none-eabihf/debug/hello
hello: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV), statically linked, with debug_info, not stripped
Binary Size
ELF files contain metadata like debug information so their size on disk is not a good indication of the amount of Flash the program will use once it’s loaded on the target device’s memory.
To display the amount of Flash the program will occupy on the target device use the cargo-size tool, which is part of the cargo-binutils package.
Install the cargo-binutils first:
cargo install cargo-binutils
✅ Use the following command to print the binary’s size in system V format.
cargo size --bin hello -- -A
Expected output: The breakdown of the program’s static memory usage per linker section.
$ cargo size --bin hello -- -A
Compiling radio v0.0.0 (/Users/jonathan/Documents/rust-exercises/nrf52-code/radio-app)
Finished dev [optimized + debuginfo] target(s) in 0.92s
hello :
section size addr
.vector_table 256 0x0
.text 4992 0x100
.rodata 1108 0x1480
.data 48 0x2003fbc0
.gnu.sgstubs 0 0x1920
.bss 12 0x2003fbf0
.uninit 1024 0x2003fbfc
.defmt 6 0x0
.debug_loc 3822 0x0
.debug_abbrev 3184 0x0
.debug_info 109677 0x0
.debug_aranges 2896 0x0
.debug_ranges 4480 0x0
.debug_str 108868 0x0
.debug_pubnames 40295 0x0
.debug_pubtypes 33582 0x0
.ARM.attributes 56 0x0
.debug_frame 2688 0x0
.debug_line 18098 0x0
.comment 19 0x0
Total 335111
🔎 More details about each linker section:
The first three sections are contiguously located in Flash memory – on the nRF52840, flash memory spans from address 0x0000_0000 to 0x0010_0000 (i.e. 1 MiB of flash).
- The
.vector_tablesection contains the vector table, a data structure required by the Armv7E-M specification - The
.textsection contains the instructions the program will execute - The
.rodatasection contains constants like strings literals
Skipping .gnu.sgstubs (which is empty), the next few sections - .data, .bss and .uninit - are located in RAM. Our RAM spans the address range 0x2000_0000 - 0x2004_0000 (256 KB). These sections contain statically allocated variables (static variables), which are either initialised with a value kept in flash, with zero, or with nothing at all.
The remaining sections are debug information, which we ignore for now. But your debugger might refer to them when debugging!
Running the Program
Setting the log level
Enter the appropriate command into the terminal you’re using. This will set the log level for this session.
MacOS & Linux
export DEFMT_LOG=warn
PowerShell
$Env:DEFMT_LOG = "warn"
Windows Command Prompt
set DEFMT_LOG=warn
Inside VS Code
To get VS Code to pick up the environment variable, you can either:
-
set it as above and then open VS Code from inside the terminal (ensuring it wasn’t already open and hence just getting you a new window on the existing process), or
-
add it to your rust-analyzer configuration, by placing this in your
settings.jsonfile:"rust-analyzer.runnables.extraEnv": { "DEFMT_LOG": "warn" }This will ensure the variable is set whenever rust-analyzer executes
cargo runfor you.
Running from VS Code
✅ Open the nrf52-code/radio-app/src/bin/hello.rs file, go to the “Run and Debug” button on the left, and then click the “Run” triangle next to Debug Microcontroller.
Note: you will get the “Run” button if the Rust analyzer’s workspace is set to the
nrf52-code/radio-appfolder. This will be the case if the current folder in VS code (left side panel) is set tonrf52-code/radio-app.
Running from the console
If you are not using VS code, you can run the program out of your console. Enter the command cargo run --bin hello from within the nrf52-code/radio-app folder. Rust Analyzer’s “Run” button is a short-cut for that command.
Expected output
NOTE: Recent version of the nRF52840-DK have flash-read-out protection to stop people dumping the contents of flash on an nRF52 they received pre-programmed.
More recent versions of the DK board also have configuration parameters which need to be updated inside a special segment of the flash, which in turn requires a soft-reset. This needs to be done for reset pin configuration and for allowing debugging. The firmware will generally perform this task, but the interaction with previously flashed software might lead to unexpected errors on the first flash operation of a fresh board.
If you run into an error along the lines of “Debug power request failed” or “Firmware exited unexpectedly: Exception”, retry the operation and the error should disappear.
$ cargo run --bin hello
Compiling radio_app v0.0.0 (/Users/jonathan/Documents/ferrous-systems/rust-exercises/nrf52-code/radio-app)
Finished `dev` profile [optimized + debuginfo] target(s) in 0.36s
Running `probe-rs run --chip=nRF52840_xxAA --allow-erase-all --log-format=oneline target/thumbv7em-none-eabihf/debug/hello`
Erasing ✔ 100% [####################] 12.00 KiB @ 18.70 KiB/s (took 1s)
Programming ✔ 100% [####################] 12.00 KiB @ 14.34 KiB/s (took 1s)
Finished in 1.48s
Hello, world!
`dk::exit()` called; exiting ...
What just happened?
cargo run will compile the application and then invoke the probe-rs tool with its final argument set to the path of the output ELF file.
The probe-rs tool will
- flash (load) the program on the microcontroller
- reset the microcontroller to make it execute the new program
- collect logs from the microcontroller and print them to the console
- print a backtrace of the program if the halt was due to an error.
Should you need to configure the probe-rs invocation to e.g. flash a different microcontroller you can do that in the .cargo/config.toml file.
[target.thumbv7em-none-eabihf]
runner = [
"probe-rs",
"run",
"--chip",
"nRF52840_xxAA"
]
# ..
🔎 How does flashing work?
The flashing process consists of the PC communicating with a second microcontroller on the nRF52840 DK over USB (J2 port). This second microcontroller, which is a J-Link Arm Debug Probe, is connected to the nRF52840 through a electrical interface known as SWD (Serial Wire Debug). The SWD protocol specifies procedures for reading memory, writing to memory, halting the target processor, reading the target processor registers, etc.
🔎 How does logging work?
Logging is implemented using the Real Time Transfer (RTT) protocol. Under this protocol the target device writes log messages to a ring buffer stored in RAM; the PC communicates with the J-Link to read out log messages from this ring buffer. This logging approach is non-blocking in the sense that the target device does not have to wait for physical IO (USB comm, serial interface, etc.) to complete while logging messages since they are written to memory. It is possible, however, for the target device to run out of space in its logging ring buffer; this causes old log messages to be overwritten or the microcontroller to pause whilst waiting for the PC to catch up with reading messages (depending on configuration).
Panicking
✅ Open the nrf52-code/radio-app/src/bin/panic.rs file and click the “Run” button (or run with cargo run --bin panic).
This program attempts to index an array beyond its length and this results in a panic.
$ cargo run --bin panic
Compiling radio_app v0.0.0 (/Users/jonathan/Documents/ferrous-systems/rust-exercises/nrf52-code/radio-app)
Finished `dev` profile [optimized + debuginfo] target(s) in 0.03s
Running `probe-rs run --chip=nRF52840_xxAA --allow-erase-all --log-format=oneline target/thumbv7em-none-eabihf/debug/panic`
Erasing ✔ 100% [####################] 12.00 KiB @ 18.71 KiB/s (took 1s)
Programming ✔ 100% [####################] 12.00 KiB @ 14.22 KiB/s (took 1s)
Finished in 1.49s
00:00:00.000000 [ERROR] panicked at src/bin/panic.rs:30:13:
index out of bounds: the len is 3 but the index is 3 (radio_app src/lib.rs:8)
`dk::fail()` called; exiting ...
Frame 0: syscall1 @ 0x00000cac inline
/Users/jonathan/.cargo/registry/src/index.crates.io-1949cf8c6b5b557f/cortex-m-semihosting-0.5.0/src/lib.rs:201:13
Frame 1: report_exception @ 0x0000000000000caa inline
/Users/jonathan/.cargo/registry/src/index.crates.io-1949cf8c6b5b557f/cortex-m-semihosting-0.5.0/src/macros.rs:28:9
Frame 2: exit @ 0x0000000000000caa
/Users/jonathan/.cargo/registry/src/index.crates.io-1949cf8c6b5b557f/cortex-m-semihosting-0.5.0/src/debug.rs:74:25
Frame 3: fail @ 0x0000043e
/Users/jonathan/Documents/ferrous-systems/rust-exercises/nrf52-code/boards/dk/src/lib.rs:456:9
Frame 4: <unknown function @ 0x000c0a36> @ 0x000c0a36
In no_std programs the behavior of panic is defined using the #[panic_handler] attribute. In the example, the panic handler is defined in the radio-app/lib.rs file, but we can change it:
✅ Change radio-app/lib.rs and change the panic panic handler, like:
#[panic_handler]
fn panic(info: &core::panic::PanicInfo) -> ! {
defmt::error!("Oops!! {}", defmt::Debug2Format(info));
dk::fail();
}Now run the program again. Try again, but without printing the info variable.
We purposely used the Display and Debug implementation of PanicInfo. What happens when you
print info without defmt::Display2Format(..) or defmt::Debug2Format(..) wrapped around it?
Using a Hardware Abstraction Layer
✅ Open the nrf52-code/radio-app/src/bin/led.rs file.
You’ll see that it initializes your board using the dk crate:
let board = dk::init().unwrap();This grants you access to the board’s peripherals, like its LEDs.
The dk crate / library is a Board Support Package (BSP) tailored to this training to make accessing the peripherals used in this exercise as seamless as possible. You can find its source code at nrf52-code/boards/dk/src/.
dk is based on the [embassy-nrf HAL] crate, which is a Hardware Abstraction Layer (HAL) over the nRF52840 System on Chip. The purpose of a HAL is to abstract away the device-specific details of the hardware, for example registers, and instead expose a higher level API more suitable for application development.
The dk::init function we have been calling in all programs initializes a few of the nRF52840 peripherals and returns a Board structure that provides access to those peripherals. We’ll first look at the Leds API.
✅ Run the led program. Two of the green LEDs on the board should turn on; the other two should stay off.
NOTE this program will not terminate itself. Within VS code you need to click “Kill terminal” (garbage bin icon) in the bottom panel to terminate it.
✅ Open the documentation for the dk crate by running the following command from the nrf52-code/radio-app folder:
cargo doc -p dk --open
✅ Check the API docs of the Led abstraction. Change the led program, so that the bottom two LEDs are turned on, and the top two are turned off.
🔎 If you want to see logs from Led API of the dk Board Support Package, flash the dk with the following environment variable:
DEFMT_LOG=trace cargo run --bin led
The logs will appear on your console, as the output of cargo run. Among the logs you’ll find the line “I/O pins have been configured for digital output”. At this point the electrical pins of the nRF52840 microcontroller have been configured to drive the 4 LEDs on the board.
After the dk::init logs you’ll find logs about the Led API. As the logs indicate, an LED becomes active when the output of the pin is a logical zero, which is also referred as the “low” state. This “active low” configuration does not apply to all boards: it depends on how the pins have been wired to the LEDs. You should refer to the board documentation to find out which pins are connected to LEDs and whether “active low” or “active high” applies to it.
🔎 When writing your own embedded project, you can implement your own BSP similar to dk, or use the matching HAL crate for your chip directly. Check out awesome-embedded-rust if there’s a BSP for the board you want to use, or a HAL crate for the chip you’d like to use.
Timers and Time
Next we’ll look into the time related APIs exposed by the dk HAL.
✅ Open the nrf52-code/radio-app/src/bin/blinky.rs file.
This program will blink (turn on and off) one of the LEDs on the board. The time interval between each toggle operation is one second. This wait time between consecutive operations is generated by the blocking timer.wait operation. This function call will block the program execution for the specified Duration argument.
The other time related API exposed by the dk HAL is the dk::uptime function. This function returns the time that has elapsed since the call to the dk::init function. This function is used in the program to log the time of each LED toggle operation.
✅ Try changing the Duration value passed to Timer.wait. Try values larger than one second and smaller than one second. What values of Duration make the blinking imperceptible?
❗ If you set the duration to below 2ms, try removing the defmt::println! command in the loop. Too much logging will fill the logging buffer and cause the loop to slow down, resulting in the blink frequency to reduce after a while.
Radio Out
In this section you’ll send radio packets from the DK to the Dongle and get familiar with the different settings of the radio API.
Radio Setup
✅ Open the nrf52-code/radio-app/src/bin/radio-send.rs file.
✅ First run the program radio-send.rs as it is. You should see new output in the output of cargo xtask serial-term, if you left your Dongle on channel 20. If you change your Dongle’s channel to avoid interference, change to the channel to match in radio-send.rs before you run it.
$ cargo xtask serial-term
rx=0, err=0, ch=20, app=dongle-fw
(..)
Received 5 bytes (CRC=0xdad9, LQI=61)
The program broadcasts a radio packet that contains the 5-byte string Hello over channel 20 (which has a center frequency of 2450 MHz). The loopback program running on the Dongle is listening to all packets sent over channel 20; every time it receives a new packet it reports its length and the Link Quality Indicator (LQI) metric of the transmission over the USB/serial interface. As the name implies the LQI metric indicates how good the connection between the sender and the receiver is (a higher number means better quality).
Messages
In radio-send.rs we propose three different ways to define the bytes we want to send to the radio:
#![allow(unused)]
fn main() {
let msg: &[u8; 5] = &[72, 101, 108, 108, 111];
let msg: &[u8; 5] = &[b'H', b'e', b'l', b'l', b'o'];
let msg: &[u8; 5] = b"Hello";
}Here, we explain the different types.
Slices
The send method takes a reference – in Rust, a reference (&) is a non-null pointer that’s compile-time known to point into valid (e.g. non-freed) memory – to a Packet as argument. A Packet is a stack-allocated, fixed-size buffer. You can fill the Packet (buffer) with data using the copy_from_slice method – this will overwrite previously stored data.
This copy_from_slice method takes a slice of bytes (&[u8]). A slice is a reference into a list of elements stored in contiguous memory. One way to create a slice is to take a reference to an array, a fixed-size list of elements stored in contiguous memory.
#![allow(unused)]
fn main() {
// stack allocated array
let array: [u8; 3] = [0, 1, 2];
let ref_to_array: &[u8; 3] = &array;
let slice: &[u8] = &array;
}slice and ref_to_array are constructed in the same way but have different types. ref_to_array is represented in memory as a single pointer (1 word / 4 bytes); slice is represented as a pointer + length (2 words, or 8 bytes).
Because slices track length at runtime rather than in their type they can point to chunks of memory of any length.
let array1: [u8; 3] = [0, 1, 2];
let array2: [u8; 4] = [0, 1, 2, 3];
let mut slice: &[u8] = &array1;
defmt::println!("{:?}", slice); // length = 3
// now point to the other array
slice = &array2;
defmt::println!("{:?}", slice); // length = 4Byte literals
In the example we sent the list of bytes: [72, 101, 108, 108, 111], which can be interpreted as the string "Hello". To see why this is the case check this list of printable ASCII characters. You’ll see that letter H is represented by the (single-byte) value 72, e by 101, etc.
Rust provides a more convenient way to write ASCII characters: byte literals. b'H' is syntactic sugar for the literal 72u8, b'e' is equivalent to 101u8, etc.. So we can rewrite [72, 101, 108, 108, 111] as [b'H', b'e', b'l', b'l', b'o']. Note that byte literals can also represent u8 values that are not printable ASCII characters: those values are written using escaped sequences like b'\x7F', which is equivalent to 0x7F.
Byte string literals
[b'H', b'e', b'l', b'l', b'o'] can be further rewritten as b"Hello". This is called a byte string literal (note that unlike a string literal like "Hello" this one has a b before the opening double quote). A byte string literal is a series of byte literals (u8 values); these literals have type &[u8; N] where N is the number of byte literals in the string.
Because byte string literals are references you need to dereference them to get an array type.
#![allow(unused)]
fn main() {
let reftoarray: &[u8; 2] = b"Hi";
// these two are equivalent
let array1: [u8; 2] = [b'H', b'i'];
let array2: [u8; 2] = *b"Hi";
// ^ ^ dereference
}Or if you want to go the other way around: you need to take a reference to an array to get the same type as a byte string literal.
#![allow(unused)]
fn main() {
// these two are equivalent
let reftoarray1: &[u8; 2] = b"Hi";
let reftoarray2: &[u8; 2] = &[b'H', b'i'];
// ^ ^
}Character constraints in byte string vs. string literals
You can encode text as b"Hello" or as "Hello".
b"Hello" is by definition a string (series) of byte literals so each character has to be a byte literal like b'A' or b'\x7f'. You cannot use “Unicode characters” (char type) like emoji or CJK (Chinese Japanese Korean) in byte string literals.
On the other hand, "Hello" is a string literal with type &str. str strings in Rust contain UTF-8 data so these string literals can contain CJK characters, emoji, Greek letters, Cyrillic script, etc.
Printing strings and characters
In this exercise we’ll work with ASCII strings so byte string literals that contain no escaped characters are OK to use as packet payloads.
You’ll note that defmt::println!("{:?}", b"Hello") will print [72, 101, 108, 108, 111] rather than "Hello" and that the {} format specifier (Display) does not work. This is because the type of the literal is &[u8; N] and in Rust this type means “bytes”; those bytes could be ASCII data, UTF-8 data or something else.
To print this you’ll need to convert the slice &[u8] into a string (&str) using the core::str::from_utf8 function. This function will verify that the slice contains well formed UTF-8 data and interpret it as a UTF-8 string (&str). We were careful to ensure that our three example messages were the same, and were all valid UTF-8, so we expect the conversion to always succeed. Why not try and see which bytes cause this conversion to fail?
Something similar will happen with byte literals: defmt::println!("{}", b'A') will print 65 rather than A. To get the A output you can cast the byte literal (u8 value) to the char type: defmt::println!("{}", b'A' as char).
Link Quality Indicator (LQI)
received 7 bytes (CRC=Ok(0x2459), LQI=60)
✅ Now run the radio-send program several times with different variations to explore how LQI can be influenced
- change the distance between the Dongle and the DK – move the DK closer to or further away from the Dongle.
- change the transmit power
- change the channel
- change the length of the packet
- different combinations of all of the above
Take note of how LQI changes with these changes. Does packet loss occur in any of these configurations?
NOTE if you decide to send many packets in a single program then you should use the
TimerAPI to insert a delay of at least five milliseconds between the transmissions. This is required because the Dongle will use the radio medium right after it receives a packet. Not including the delay will result in the Dongle missing packets
802.15.4 radios are often used in mesh networks like Wireless Sensors Networks (WSN). The devices, or nodes, in these networks can be mobile so the distance between nodes can change in time. To prevent a link between two nodes getting broken due to mobility the LQI metric is used to decide the transmission power – if the metric degrades power should be increased, etc. At the same time, the nodes in these networks often need to be power efficient (e.g. are battery powered) so the transmission power is often set as low as possible – again the LQI metric is used to pick an adequate transmission power.
🔎 802.15.4 compatibility
The radio API we are using follows the PHY layer of the IEEE 802.15.4 specification, but it’s missing MAC level features like addressing (each device gets its own address), opt-in acknowledgment (a transmitted packet must be acknowledged with a response acknowledgment packet; the packet is re-transmitted if the packet is not acknowledged in time). These MAC level features are not implemented in hardware (in the nRF52840 Radio peripheral) so they would need to be implemented in software to be fully IEEE 802.15.4 compliant.
This is not an issue for these exercises but it’s something to consider if you would like to continue from here and build a 802.15.4 compliant network API.
Radio In
In this section we’ll explore the recv_timeout method of the Radio API. As the name implies, this is used to listen for packets. The method will block the program execution until a packet is received or the specified timeout has expired. We’ll continue to use the Dongle in this section; it should be running the loopback application; and cargo xtask serial-term should also be running in the background.
The loopback application running on the Dongle will broadcast a radio packet after receiving one over channel 20. The contents of this outgoing packet will be the contents of the received one but reversed.
✅ Open the nrf52-code/radio-app/src/bin/radio-recv.rs file. Make sure that the Dongle and the Radio are set to the same channel. Click the “Run” button.
The Dongle does not inspect the contents of your packet and does not require them to be ASCII, or UTF-8. It will simply send a packet back containing the same bytes it received, except the bytes will be in reverse order to how you sent it.
That is, if you send b"olleh", it will send back b"hello".
The Dongle will respond as soon as it receives a packet. If you insert a delay between the send operation and the recv operation in the radio-recv program this will result in the DK not seeing the Dongle’s response. So try this:
✅ Add a timer.wait(x) call before the recv_timeout call, where x is core::time::Duration; try different lengths of time for x and observe what happens.
Having log statements between send and recv_timeout can also cause packets to be missed so try to keep those two calls as close to each other as possible and with as little code in between as possible.
NOTE Packet loss can always occur in wireless networks, even if the radios are close to each other. The
RadioAPI we are using will not detect lost packets because it does not implement IEEE 802.15.4 Acknowledgement Requests. For the next step in the exercise, we will use a new function to handle this for us. For the sake of other radio users, please do ensure you never callsend()in a tight loop!
Radio Puzzle
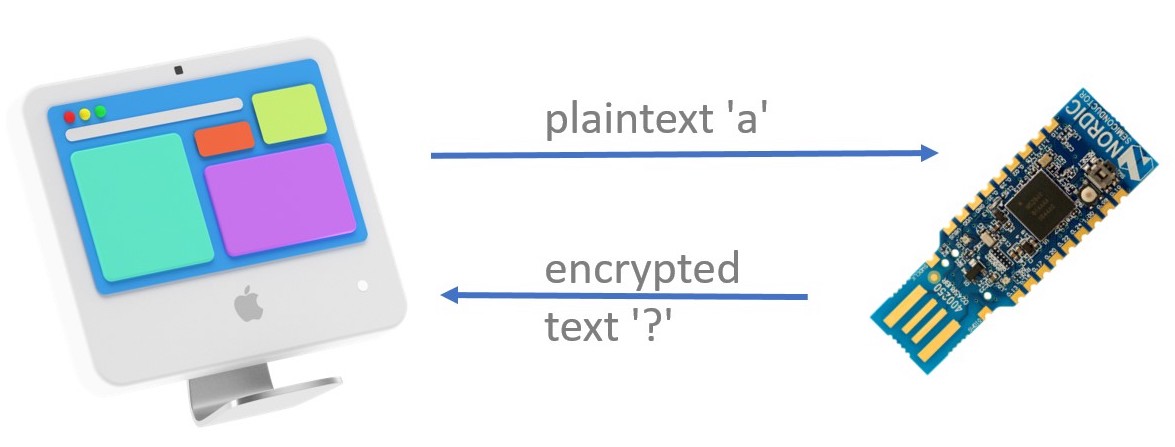
Your task in this section is to decrypt the substitution cipher encrypted ASCII string stored in the Dongle using one of the stack-allocated maps in the heapless crate. The string has been encrypted using simple substitution.
Preparing the Dongle
✅ Switch the dongle to the puzzle mode by pressing the large user button. The LED should switch to blue in the puzzle mode.
Like in the previous sections the Dongle will listen for radio packets over channel 20 – while also logging messages over a USB/serial interface. It also prints a . periodically so you know it’s still alive.
Sending Messages and Receiving the Dongle’s Responses
✅ Open the nrf52-code/radio-app folder in VS Code; then open the src/bin/radio-puzzle.rs file. Run the program.
This will send a zero sized packet let msg = b"" to the dongle. It does this using a special function called dk::send_recv. This function will:
- Determine a unique address for your nRF52840 (Nordic helpfully bake a different random address into every nRF52 chip they make)
- Construct a packet where the first six bytes are the unique address, and the remainder are the ones you passed to the
send_recv()function - Use the
Radio::send()method to wait for the channel to be clear (using a Clear Channel Assessment) before actually sending the packet - Use the
Radio::recv_timeout()method to wait for a reply, up to the given number of microseconds specified - Check that the first six bytes in the reply match our six byte address
a. If so, the remainder of the reply is returned as the
Okvariant b. Otherwise, increment a retry counter and, if we have run out of retry attempts, we return theErrvariant c. Otherwise, we go back to step 2 and try again.
This function allows communication with the USB dongle to be relatively robust, even in the presence of other devices on the same channel. However, it’s not perfect and sometimes you will run out of retry attempts and your program will need to be restarted.
❗ The Dongle responds to the DK’s requests wirelessly (i.e. by sending back radio packets) as well. You’ll see the dongle responses printed by the DK. This means you don’t have to worry if serial-term doesn’t work on your machine.
✅ Try sending one-byte sized packets. ✅ Try sending longer packets.
What happens?
❗ The Dongle responds to the DK’s requests wirelessly (i.e. by sending back radio packets) as well. You’ll see the dongle responses printed by the DK. This means you don’t have to worry if serial-term doesn’t work on your machine.
Answer
The Dongle will respond differently depending on the length of the payload in the incoming packet:
- On zero-sized payloads (i.e. packets that only contain the device address and nothing else) it will respond with the encrypted string.
- On one-byte sized payloads it will respond with the direct mapping from the given plaintext letter (single
u8value) to the corresponding ciphertext letter (anotheru8value). - On payloads of any other length the Dongle will respond with the string
correctif it received the correct secret string, otherwise it will respond with the stringincorrect.
The Dongle will always respond with payloads that are valid UTF-8 so you can use str::from_utf8 on the response packets. However, do not attempt to look inside the raw packet, as it will contain six random address bytes at the start, and they will not be valid UTF-8. Only look at the &[u8] that the send_recv() function returns, and treat the Packet as just a storage area that you don’t look inside.
This step is illustrated in src/bin/radio-puzzle-1.rs
From here on, the exercise can be solved in multiple ways. If you have an idea on how to go from here and what tools to use, you can work on your own. If you don’t have an idea what to do next or what tools to use, we’ll provide a guide on the next page.
Help
Use a dictionary
Our suggestion is to use a dictionary / map. std::collections::HashMap is not available in no_std code (it requires a secure random number generator to prevent collision attacks) but you can use one of the stack-allocated maps in the heapless crate. It supplies a stack-allocated, fixed-capacity version of the std::Vec type which will come in handy to store byte arrays. To store character mappings we recommend using a heapless::LinearMap.
heapless is already declared as a dependency in the Cargo.toml of the project so you can directly import it into the application code using a use statement.
use heapless::Vec; // like `std::Vec` but stack-allocated
use heapless::LinearMap; // a dictionary / map
fn main() {
// A hash map with a capacity of 16 `(u8, u8)` key-value pairs allocated on the stack
let mut my_map = LinearMap::<u8, u8, 16>::new();
my_map.insert(b'A', b'~').unwrap();
// A vector with a fixed capacity of 8 `u8` elements allocated on the stack
let mut my_vec = Vec::<u8, 8>::new();
my_vec.push(b'A').unwrap();
}If you haven’t used a stack-allocated collection before note that you’ll need to
specify the capacity of the collection as a const-generic parameter. The larger
the value, the more memory the collection takes up on the stack. The
heapless::LinearMap documentation of the heapless crate has some
usage examples, as does the heapless::Vec documentation.
Note the difference between character literals and byte literals!
Something you will likely run into while solving this exercise are character literals ('c') and byte literals (b'c'). The former has type char and represent a single Unicode “scalar value”. The latter has type u8 (1-byte integer) and it’s mainly a convenience for getting the value of ASCII characters, for instance b'A' is the same as the 65u8 literal.
IMPORTANT you do not need to use the str or char API to solve this problem, other than for printing purposes. Work directly with slices of bytes ([u8]) and bytes (u8); and only convert those to str or char when you are about to print them.
Note: The plaintext secret string is not stored in
dongle-fwso runningstringson it will not give you the answer. Nice try.
Make sure not to flood the log buffer
When you log more messages than can be moved from the probe to the target, the log buffer will get overwritten, resulting in data loss. This can easily happen when you repeatedly poll the dongle and log the result. The quickest solution to this is to wait a short while until you send the next packet so that the logs can be processed in the meantime.
use core::time::Duration;
#[entry]
fn main() -> ! {
let mut timer = board.timer;
for plainletter in 0..=127 {
/* ... send letter to dongle ... */
defmt::println!("got response");
/* ... store output ... */
timer.wait(Duration::from_millis(20));
}
}Recommended Steps
Each step is demonstrated in a separate example so if for example you only need a quick reference of how to use the map API you can look at step / example number 2 and ignore the others.
-
Send a one letter packet (e.g.
A) to the radio to get a feel for how the mapping works. Then do a few more letters. Seesrc/bin/radio-puzzle-1.rs. -
Get familiar with the dictionary API. Do some insertions and look ups. What happens if the dictionary gets full? See
src/bin/radio-puzzle-2.rs. -
Next, get mappings from the radio and insert them into the dictionary. See
src/bin/radio-puzzle-3.rs. -
You’ll probably want a buffer to place the plaintext in. We suggest using
heapless::Vecfor this. Seesrc/bin/radio-puzzle-4.rsfor a starting-point (NB It is also possible to decrypt the packet in place). -
Simulate decryption: fetch the encrypted string and “process” each of its bytes. See
src/bin/radio-puzzle-5.rs. -
Now merge steps 3 and 5: build a dictionary, retrieve the secret string and do the reverse mapping to decrypt the message. See
src/bin/radio-puzzle-6.rs. -
As a final step, send the decrypted string to the Dongle and check if it was correct or not. See
src/bin/radio-puzzle-7.rs.
For your reference, we have provided a complete solution in the src/bin/radio-puzzle-solution.rs file. That solution is based on the seven steps outlined above. Did you solve the puzzle in a different way?
All finished? See the next steps.
Next Steps
If you’ve already completed the main exercise tasks or would like to explore more on your own this section has some suggestions.
Alternative containers
Modify-in-place
If you solved the puzzle using a Vec buffer you can try solving it without the buffer as a
stretch goal. You may find the slice methods that let you mutate a Packet’s data useful,
but remember that the first six bytes of your Packet will be the random device address - you
can’t decrypt those!
Using heapless::FnvIndexMap
The heapless::LinearMap performs lookup via linear search, which can be slow for a large number of
keys. The FNV Index Map can be used as a drop-in replacement which performs hashing and
thus has a fast lookup similar to the containers provided by the standard library.
Using liballoc::BTreeMap
If you solved the puzzle using a heapless::Vec buffer and a heapless::LinearMap and you still need something else to try, you could look at the Vec and BTreeMap types contained within liballoc. This will require you to set up a global memory allocator, like embedded-alloc.
Collision avoidance
In this section you’ll test the collision avoidance feature of the IEEE 802.15.4 radio used by the Dongle and DK.
If you check the API documentation of the Radio abstraction we have been using you’ll notice that we haven’t used these methods: energy_detection_scan(), set_cca() and try_send().
The first method scans the currently selected channel (see set_channel()), measures the energy level of ongoing radio communication in this channel and returns the maximum energy observed over a span of time. This method can be used to determine what the idle energy level of a channel is. If there’s non-IEEE 802.15.4 traffic on this channel the method will return a high value.
Under the 802.15.4 specification, before sending a data packet devices must first check if there’s communication going on in the channel. This process is known as Clear Channel Assessment (CCA). The send method we have been used performs CCA in a loop and sends the packet only when the channel appears to be idle. The try_send method performs CCA once and returns the Err variant if the channel appears to be busy. In this failure scenario the device does not send any packet.
The Radio abstraction supports 2 CCA modes: CarrierSense and EnergyDetection. CarrierSense is the default CCA mode and what we have been using in this exercise. CarrierSense will only look for ongoing 802.15.4 traffic in the channel but ignore other traffic like 2.4 GHz WiFi and Bluetooth. The EnergyDetection method is able to detect ongoing non-802.15.4 traffic.
Here are some things for you to try out:
-
First, read the section 6.20.12.4 of the nRF52840 Product Specification, which covers the nRF52840’s implementation of CCA.
-
Disconnect the Dongle. Write a program for the DK that scans and reports the energy levels of all valid 802.15.4 channels. In your location which channels have high energy levels when there’s no ongoing 802.15.4 traffic? If you can, use an application like WiFi Analyzer to see which WiFi channels are in use in your location. Compare the output of WiFiAnalyzer to the values you got from
energy_detection_scan. Is there a correspondence? Note that WiFi channels don’t match in frequency with 802.15.4 channels; some mapping is required to convert between them – check this illustration for more details about co-existence of 802.15.4 and WiFi. -
Choose the channel with the highest idle energy. Now write a program on the DK that sets the CCA mode to
EnergyDetectionand then send a packet over this channel usingtry_send. TheEnergyDetectionCCA mode requires a Energy Detection (ED) “threshold” value. Try different threshold values. What threshold value makes thetry_sendsucceed? -
Repeat the previous experiment but use the channel with the lowest idle energy.
-
Pick the channel with the lowest idle energy. Run the
dongle-fwapp on the Dongle and set its listening channel to the chosen channel. Modify the DK program to perform asendoperation immediately followed by atry_sendoperation. Thetry_sendoperation will collide with the response of the Dongle (remember: the Dongle responds to all incoming packets after a 500 microsecond delay - see thedongle-fwprogram for details). Find a ED threshold that detects this collision and makestry_sendreturn theErrvariant.
Interrupt handling
If we haven’t covered interrupt handling in your training, the cortex-m-rt crate provides attributes to declare exception and interrupt handlers: #[exception] and #[interrupt]. You can find documentation about these attributes and how to safely share data with interrupt handlers using Mutexes in the “Concurrency” chapter of the Embedded Rust book.
Another way to deal with interrupts is to use a framework like Real-Time Interrupt-driven Concurrency (RTIC); this framework has a book that explains how you can build reactive applications using interrupts. We use this framework in the “USB” exercise.
Starting a Project from Scratch
So far we have been using a pre-made Cargo project to work with the nRF52840 DK. In this section we’ll see how to create a new embedded project for any microcontroller.
Identify the microcontroller
The first step is to identify the microcontroller you’ll be working with. The information about the microcontroller you’ll need is:
1. Its processor architecture and sub-architecture
This information should be in the device’s data sheet or manual. In the case of the nRF52840, the processor is an ARM Cortex-M4 core. With this information you’ll need to select a compatible compilation target. rustup target list will show all the supported compilation targets.
$ rustup target list
(..)
thumbv6m-none-eabi
thumbv7em-none-eabi
thumbv7em-none-eabihf
thumbv7m-none-eabi
thumbv8m.base-none-eabi
thumbv8m.main-none-eabi
thumbv8m.main-none-eabihf
The compilation targets will usually be named using the following format: $ARCHITECTURE-$VENDOR-$OS-$ABI, where the $VENDOR field is sometimes omitted. Bare metal and no_std targets, like microcontrollers, will often use none for the $OS field. When the $ABI field ends in hf it indicates that the output ELF uses the hardfloat Application Binary Interface (ABI).
The thumb targets listed above are all the currently supported ARM Cortex-M targets. The table below shows the mapping between compilation targets and ARM Cortex-M processors.
| Compilation target | Processor |
|---|---|
thumbv6m-none-eabi | ARM Cortex-M0, ARM Cortex-M0+ |
thumbv7m-none-eabi | ARM Cortex-M3 |
thumbv7em-none-eabi | ARM Cortex-M4, ARM Cortex-M7 |
thumbv7em-none-eabihf | ARM Cortex-M4F, ARM Cortex-M7F |
thumbv8m.base-none-eabi | ARM Cortex-M23 |
thumbv8m.main-none-eabi | ARM Cortex-M33, ARM Cortex-M35P |
thumbv8m.main-none-eabihf | ARM Cortex-M33F, ARM Cortex-M35PF |
The ARM Cortex-M ISA is backwards compatible so for example you could compile a program using the thumbv6m-none-eabi target and run it on an ARM Cortex-M4 microcontroller. This will work but using the thumbv7em-none-eabi results in better performance (ARMv7-M instructions will be emitted by the compiler) so it should be preferred. The older ISAs may also be limited in terms of the maximum number of interrupts you can define, which maybe be fewer than your newer microcontroller actually has.
2. Its memory layout
In particular, you need to identify how much Flash and RAM memory the device has and at which address the memory is exposed. You’ll find this information in the device’s data sheet or reference manual.
In the case of the nRF52840, this information is in section 4.2 (Figure 2) of its Product Specification. It has:
- 1 MB of Flash that spans the address range:
0x0000_0000-0x0010_0000. - 256 KB of RAM that spans the address range:
0x2000_0000-0x2004_0000.
Most modern Rust HALs take care of importing the correct memory layout for your chip automatically.
If this is not done by your HAL or BSP library, you have to supply this information to the linker
yourself, usually through a memory.x file (which is imported by the link.x
script supplied by the cortex-m-rt crate).
The app-template project template
With all this information you’ll be able to build programs for the target device. The app-template project template provides the most frictionless way to start a new project for the ARM Cortex-M architecture – for other architectures check out other project templates by the rust-embedded organization. It uses
the cargo-generate tool to set up a lot of the scaffolding and boilerplate necessary
for embedded Rust projects.
If there’s no template or signs of support for a particular architecture under the rust-embedded organization then you can follow the embedonomicon to bootstrap support for the new architecture by yourself.
Flashing the program
To flash the program on the target device you’ll need to identify the on-board debugger, if the development board has one. Or choose an external debugger, if the development board exposes a JTAG or SWD interface via some connector.
If the hardware debugger is supported by the probe-rs project – for example J-Link, ST-Link or CMSIS-DAP – then you’ll be able to use probe-rs-based tools like probe-rs and cargo-embed. This is the case of the nRF52840 DK: it has an on-board J-Link probe.
If the debugger is not supported by probe-rs then you’ll need to use OpenOCD or vendor provided software to flash programs on the board.
If the board does not expose a JTAG, SWD or similar interface then the microcontroller probably comes with a bootloader as part of its stock firmware. In that case you’ll need to use dfu-util or a vendor specific tool like nrfdfu or nrfutil to flash programs onto the chip. This is the case of the nRF52840 Dongle.
Getting output
If you are using one of the probes supported by probe-rs then you can use the defmt-rtt library to get
text output on probe-rs which is efficiently formatted using the defmt library. The logging
functionality we used in the examples is implemented using the defmt-rtt crate.
If that’s not the case or there’s no debugger on board then you’ll need to add a HAL before you can get text output from the board.
Adding a Hardware Abstraction Layer (HAL)
Now you can hopefully run programs and get output from them. To use the hardware features of the device you’ll need to add a HAL to your list of dependencies. crates.io, lib.rs and awesome embedded Rust are good places to search for HALs.
After you find a HAL you’ll want to get familiar with its API through its API docs and examples. HAL do not always expose the exact same API, specially when it comes to initialization and configuration of peripherals. However, most HAL will implement the embedded-hal traits. These traits allow inter-operation between the HAL and driver crates. These driver crates provide functionality to interface external devices like sensors, actuators and radios over interfaces like I2C and SPI.
If no HAL is available for your device then you’ll need to build one yourself. This is usually done by first generating a Peripheral Access Crate (PAC) from a System View Description (SVD) file using the svd2rust tool. The PAC exposes a low level, but type safe, API to modify the registers on the device. Once you have a PAC you can use of the many HALs on crates.io as a reference; most of them are implemented on top of svd2rust-generated PACs.
If no SVD files are available or if the capability of the generated PACs is insufficient, you
can write your own PAC blocks in a declarative way using derive-mmio.
Hello, 💡
Now that you’ve set up your own project from scratch, you could start playing around with it by turning on one of the DK’s on-board LEDs using only the HAL. Some hints that might be helpful there:
- The Nordic Infocenter tells you which LED is connected to which pin.
nRF52 HAL Exercise
In this exercise you’ll learn to:
- use a HAL to provide features in a BSP
- configure GPIO pins using the nRF52 HAL
To test your BSP changes, you will modify a small example: hal-app/src/bin/blinky.rs
You will need an nRF52840 Development Kit for this exercise, but not the nRF USB dongle.
If you haven’t completed the Radio Exercise, you should start there, and go at least as far as completing the “Timers and Time” section.
The nRF52840 Development Kit
This is the larger development board.
The board has two USB ports: J2 and J3 and an on-board J-Link programmer / debugger – there are instructions to identify the ports in a previous section. USB port J2 is the J-Link’s USB port. USB port J3 is the nRF52840’s USB port. Connect the Development Kit to your computer using the J2 port.
Adding Buttons
To practice using a HAL to provide functionality through a Board Support Package, you will now modify the dk crate to add support for Buttons.
Change the demo app
✅ Change the hal-app/src/bin/buttons.rs file as described within, so it looks for button presses.
It should now fail to compile, because the dk crate doesn’t have support for buttons. You will now fix that!
Define a Button
✅ Open up the dk crate in VS Code (nrf52-code/boards/dk) and open src/lib.rs.
✅ Add a struct Button which represents a single button.
It should be similar to struct Led, except the inner type must be Input<'static>.
You will need to import those types - look where the Output type was imported from for clues!
Think about where it makes sense to add this new type. At the top? At the bottom? Maybe just after to the LED related types?
🔎 The pins must be set as pull-ups because each button connects a GPIO pin to ground, but the pins float when the button is not pressed. Enabling the pull-ups inside the SoC ensure that the GPIO pin is weakly connected to 3.3V through a resistor, giving it a ‘default’ value of ‘high’. Pressing the button then makes the pin go ‘low’.
Define all the Buttons
✅ Add a struct Buttons which contains four buttons.
Use struct Leds for guidance. Add a buttons field to struct Board which is of type Buttons. Again, think about where it makes sense to insert this new field.
Set up the buttons
Now the Board struct initialiser is complaining you didn’t initialise the new buttons field.
✅ Take pins from the HAL, configure them as inputs with pull-ups, and install them into the Buttons structure.
The mapping is:
- Button 1: P0.11
- Button 2: P0.12
- Button 3: P0.24
- Button 4: P0.25
You can verify this in the User Guide.
Run your program
✅ Run the buttons demo:
cd nrf52-code/hal-app
cargo run --bin buttons
Now when you press the button, the LED should illuminate. If it does the opposite, check your working!
Write a more interesting demo program for the BSP
✅ You’ve got four buttons and four LEDs. Make up a demo!
If you’re stuck for ideas, you could have the LEDs do some kind of animation. The buttons might then stop or start the animation, or make it go faster or slower. Try setting up a loop with a 20ms delay inside it, to give yourself a basic 50 Hz “game tick”. You can look at the blinky demo for help with the timer.
Troubleshooting
🔎 If you get totally stuck, ask for help! If all else fails, you could peek in nrf52-code/boards/dk-solution, which has a complete set of the required BSP changes.
nRF52 USB Exercise
In this exercise you’ll learn to:
- work with registers and peripherals from Rust
- handle external events in embedded Rust applications using RTIC
- debug event driven applications
- test
no_stdcode
To put these concepts and techniques in practice you’ll write a toy USB device application that gets enumerated and configured by the host. This embedded application will run in a fully event driven fashion: only doing work when the host asks for it.
You will need an nRF52840 Development Kit for this exercise, but not the nRF USB dongle.
The nRF52840 Development Kit
The board has two USB ports: J2 and J3 and an on-board J-Link programmer / debugger – there are instructions to identify the ports in a previous section. USB port J2 is the J-Link’s USB port. USB port J3 is the nRF52840’s USB port. Connect the Development Kit to your computer using both ports.
Exercise Steps
You will need to complete the exercise steps in order. It’s OK if you don’t get them all finished, but you must complete one before starting the next one. You can look at the solution for each step if you get stuck.
If you are reading the book view, the steps are listed on the left in the sidebar (use the hamburger if that is hidden). If you are reading the source on Github, go back to the SUMMARY.md file to see the steps.
Listing USB Devices
We can use cyme as a generic application to list USB devices on our system. It is the
Rust version of lsusb.
If you have not installed cyme yet, you can use
cargo install cyme
to install the tool.
✅ To list all USB devices, run cyme from the top-level checkout.
$ cyme
(...) random other USB devices will be listed
2 15 0x1366 0x1051 J-Link 001050255503 12.0 Mb/s
The goal of this exercise is to get the nRF52840 SoC to show in this list. The embedded application will use the USB Vendor ID (VID) 0x1209 and USB Product ID (PID) 0x0001, as defined in nrf52-code/consts:
$ cyme
(...) random other USB devices will be listed
2 15 0x1366 0x1051 J-Link 001050255503 12.0 Mb/s
2 16 0x1209 0x0001 composite_device - 12.0 Mb/s
Hello, world!
In this section, we’ll set up the integration in VS Code and run the first program.
✅ Open the nrf52-code/usb-app folder in VS Code and open the src/bin/hello.rs file.
Note: To ensure full rust-analyzer support, do not open the whole
rust-exercisesfolder.
Give rust-analyzer some time to analyze the file and its dependency graph. When it’s done, a “Run” button will appear over the main function. If it doesn’t appear on its own, type something in the file, delete and save. This should trigger a re-load.
✅ Click the “Run” button to run the application on the microcontroller.
If you are not using VS code run the cargo run --bin hello command from the nrf52-code/usb-app folder.
NOTE: Recent version of the nRF52840-DK have flash-read-out protection to stop people dumping the contents of flash on an nRF52 they received pre-programmed.
If you run into an error along the lines of “Debug power request failed” retry the operation and the error should disappear.
The usb-app package has been configured to cross-compile applications to the ARM Cortex-M architecture and then run them using the probe-rs custom Cargo runner. The probe-rs tool will load and run the embedded application on the microcontroller and collect logs from the microcontroller.
The probe-rs process will terminate when the microcontroller enters the “halted” state. From the embedded application, one can enter the “halted” state using by performing a CPU breakpoint with a special argument that indicates ‘success’. For convenience, an exit function is provided in the dk Board Support Package (BSP). This function is divergent like std::process::exit (fn() -> !) and can be used to halt the device and terminate the probe-rs process.
Checking the API documentation
We’ll be using the dk Board Support Package. It’s good to have its API documentation handy. You can generate the documentation for that crate from the command line:
✅ Run the following command from within the nrf52-code/usb-app folder. It will open the generated documentation in your default web browser. Note that if you run it from inside the nrf52-code/boards/dk folder, you will find a bunch of USB-related documentation missing, because we disable that particular feature by default.
cargo doc --open
NOTE: If you are using Safari and the documentation is hard to read due to missing CSS, try opening it in a different browser.
✅ Browse to the documentation for the dk crate, and look at what is available within the usbd module. Some of these functions will be useful later.
RTIC hello
RTIC, Real-Time Interrupt-driven Concurrency, is a framework for building event-driven, time-sensitive applications.
✅ Open the nrf52-code/usb-app/src/bin/rtic-hello.rs file.
RTIC applications are written in RTIC’s Domain Specific Language (DSL). The DSL extends Rust syntax with custom attributes like #[init] and #[idle].
RTIC makes a clearer distinction between the application’s initialization phase, the #[init] function, and the application’s main loop or main logic, the #[idle] function. The initialization phase runs with interrupts disabled and interrupts are re-enabled before the idle function is executed.
rtic::app is a procedural macro that generates extra Rust code, in addition to the user’s functions. The fully expanded version of the macro can be found in the file target/rtic-expansion.rs. This file will contain the expansion of the procedural macro for the last compiled RTIC application.
✅ Build the rtic-hello example and look at the generated rtic-expansion.rs file.
You can use rustfmt on target/rtic-expansion.rs to make the generated code easier to read. Among other things, the file should contain the following lines. Note that interrupts are disabled during the execution of the init function:
#[doc(hidden)]
#[no_mangle]
unsafe extern "C" fn main() -> ! {
rtic::export::interrupt::disable();
let mut core: rtic::export::Peripherals = rtic::export::Peripherals::steal().into();
#[inline(never)]
fn __rtic_init_resources<F>(f: F)
where
F: FnOnce(),
{
f();
}
let mut executors_size = 0;
extern "C" {
pub static _stack_start: u32;
pub static __ebss: u32;
}
let stack_start = &_stack_start as *const _ as u32;
let ebss = &__ebss as *const _ as u32;
if stack_start > ebss {
if rtic::export::msp::read() <= ebss {
panic!("Stack overflow after allocating executors");
}
}
__rtic_init_resources(|| {
let (shared_resources, local_resources) =
init(init::Context::new(core.into(), executors_size));
rtic::export::interrupt::enable();
});
idle(idle::Context::new())
}Dealing with Registers
In this and the next section we’ll look into RTIC’s event handling features. To explore these features we’ll use the action of connecting a USB cable to the DK’s port J2 as the event we’d like to handle.
✅ Open the nrf52-code/usb-app/src/bin/events.rs file.
We’ll read the code and explain what it does.
The example application enables the signaling of this “USB power” event in the init function. This is done using the low level register API generated by the chiptool tool. The register API was generated from a SVD (System View Description) file, a file that describes all the peripherals and registers, and their memory layout, on a device. In our case the device was the nRF52840; a sample SVD file for this microcontroller can be found here.
In the chiptool API, peripherals are represented as structs. The fields of each peripheral struct are the registers associated to that peripheral. Each register field exposes methods to read and write to the register in a single memory operation.
The read and write methods take closure arguments. These closures in turn grant access to a “constructor” value, usually named w, which provides methods to modify the bitfields of a register.
At the same time the API of these “constructors” prevent you from modifying the reserved parts of the register: you cannot write arbitrary values into registers; you can only write valid values into registers.
Apart from the read and write methods there’s a modify method that performs a read-modify-write operation on the register;
this API is also closure-based.
In Cortex-M devices interrupt handling needs to be enabled on two sides: on the peripheral side and on the core side. The register operations done in init take care of the peripheral side. The core side of the operation involves writing to the registers of the Nested Vector Interrupt Controller (NVIC) peripheral. This second part doesn’t need to be done by the user in RTIC applications because the framework takes care of it.
Event Handling
Below the idle function you’ll see a #[task] handler, a function. This task is bound to the POWER_CLOCK interrupt signal and will be executed, function-call style, every time the interrupt signal is raised by the hardware.
✅ Run the events application. Then connect a micro-USB cable to your PC/laptop then connect the other end to the DK (port J3). You’ll see the “POWER event occurred” message after the cable is connected.
Note that all tasks will be prioritized over the idle function so the execution of idle will be interrupted (paused) by the on_power_event task. When the on_power_event task finishes (returns) the execution of the idle will be resumed. This will become more obvious in the next section.
Try this: add an infinite loop to the end of init so that it never returns. Now run the program and connect the USB cable. What behavior do you observe? How would you explain this behavior? (hint: look at the rtic-expansion.rs file: under what conditions is the init function executed?)
Task State
Now let’s say we want to change the previous program to count how many times the USB cable (port J3) has been connected and disconnected.
✅ Open the nrf52-code/usb-app/src/bin/task-state.rs file.
Tasks run from start to finish, like functions, in response to events. To preserve some state between the different executions of a task we can add a resource to the task. In RTIC, resources are the mechanism used to share data between different tasks in a memory safe manner but they can also be used to hold task state.
To get the desired behavior we’ll want to store some counter in the state of the on_power_event task.
The starter code shows the syntax to declare a resource, the Resources struct, and the syntax to associate a resource to a task, the resources list in the #[task] attribute.
In the starter code a resource is used to move (by value) the POWER peripheral from init to the on_power_event task. The POWER peripheral then becomes part of the state of the on_power_event task and can be persistently accessed throughout calls to on_power_event() through a reference. The resources of a task are available via the Context argument of the task.
To elaborate more on this move action: in the svd2rust API, peripheral types like POWER are singletons (only a single value of that type can ever exist). The consequence of this design is that holding a peripheral instance, like POWER, by value means that the function (or task) has exclusive access, or ownership, over the peripheral. This is the case of the init function: it owns the POWER peripheral but then transfers ownership over it to a task using the resource initialization mechanism.
We have moved the POWER peripheral into the task because we want to clear the USBDETECTED interrupt flag after it has been set by the hardware. If we miss this step the on_power_event task (function) will be called again once it returns and then again and again and again (ad infinitum).
Also note that in the starter code the idle function has been modified. Pay attention to the logs when you run the starter code.
✅ Modify the program so that it prints the number of times the USB cable has been connected to the DK every time the cable is connected, as shown below.
USBDETECTED interrupt enabled
idle: going to sleep
on_power_event: cable connected 1 time
idle: woke up
idle: going to sleep
on_power_event: cable connected 2 times
idle: woke up
idle: going to sleep
on_power_event: cable connected 3 times
You can find a solution to this exercise in the nrf52-code/usb-app-solutions/src/bin/task-state.rs file.
USB Enumeration
A USB device, like the nRF52840, can be one of these three states:
- Default
- Address
- Configured
After being powered the device will start in the Default state. The enumeration process will take the device from the Default state to the Address state. As a result of the enumeration process the device will be assigned an address, in the range 1..=127, by the host.
The USB protocol is complex so we’ll leave out many details and focus only on the concepts required to get enumeration and configuration working. There are also several USB specific terms so we recommend checking chapter 2, “Terms and Abbreviations”, of the USB specification (linked at the bottom of this document) every now and then.
Each OS may perform the enumeration process slightly differently but the process will always involve these host actions:
- A USB reset, to put the device in the Default state, regardless of what state it was in.
- A
GET_DESCRIPTORrequest, to get the device descriptor. - A
SET_ADDRESSrequest, to assign an address to the device.
These host actions will be perceived as events by the nRF52840 and these events will cause some bits to be set in the relevant register, and then an interrupt to be fired. During this exercise, we will gradually parse and handle these events and learn more about Embedded Rust along the way.
There are more USB concepts involved that we’ll need to cover, like descriptors, configurations, interfaces and endpoints but for now let’s see how to handle USB events.
For each step of the course, we’ve prepared a usb-<n>.rs file that gives you a base structure and hints on how to proceed. The matching usb-<n>.rs in usb-app-solutions contains a sample solution should you need it. Switch from usb-<n>.rs to usb-<n+1>.rs when instructed and continue working from there. Please keep the USB cable plugged into J3 through all these exercises.
USB-1: Dealing with USB Events
The USBD peripheral on the nRF52840 contains a series of registers, called EVENTS registers, that indicate the reason for entering the USBD interrupt handler. These events must be handled by the application to complete the enumeration process.
✅ Open the nrf52-code/usb-app/src/bin/usb-1.rs file.
In this starter code the USBD peripheral is initialized in init and a task, named handle_usb_interrupt, is bound to the interrupt signal called USBD. This task will be called every time a new USBD event needs to be handled. The handle_usb_interrupt task uses usbd::next_event() to check all the event registers; if any event is set (i.e. that event just occurred) then the function returns the event, represented by the Event enum, wrapped in the Some variant. This Event is then passed to the on_event function for further processing.
✅ Connect the USB cable to the port J3 then run the starter code.
❗️ Keep the cable connected to the J3 port for the rest of the exercise.
This code will panic because Event::UsbReset is not handled yet - it has a todo!() on the relevant match arm.
✅ Go to fn on_event(...). You’ll need to handle the Event::UsbReset case - for now, just print the log message returning to the Default state.
✅ Now handle the Event::UsbEp0Setup case - for now, just print the log message usb-1 exercise complete and then execute dk::exit() to shut down the microcontroller.
Your logs should look like:
USBD initialized
USB: UsbReset
returning to the Default state
USB: UsbEp0Setup
usb-1 exercise complete
You can ignore the Event::UsbEp0DataDone event for now because we don’t yet get far enough when talking to the host computer for this event to come up.
USB Knowledge
USBRESET (indicated by Events::UsbReset)
This event indicates that the host issued a USB reset signal - the first step in the enumeration process. According to the USB specification this will move the device from any state to the Default state. Since we are currently not dealing with any other state, for now we just log that we received this event and move on.
EP0SETUP (indicated by Events::UsbEp0Setup)
The USBD peripheral has detected the SETUP stage of a control transfer. For now, we just print a log message and exit the application.
EP0DATADONE (indicated by Events::UsbEp0DataDone)
The USBD peripheral is signaling the end of the DATA stage of a control transfer. Since you won’t encounter this event just yet, you can leave it as it is.
Help
You can find the solution in the nrf52-code/usb-app-solutions/src/bin/usb-1.rs file.
USB Endpoints

Under the USB protocol data transfers occur over endpoints.
Endpoints are similar to UDP or TCP ports in that they allow logical multiplexing of data over a single physical USB bus. USB endpoints, however, have directions: an endpoint can either be an IN endpoint or an OUT endpoint. The direction is always from the perspective of the host so at an IN endpoint data travels from the device to the host and at an OUT endpoint data travels from the host to the device.
Endpoints are identified by their address, a zero-based index, and direction. There are four types of endpoints: control endpoints, bulk endpoints, interrupt endpoints and isochronous endpoints. Each endpoint type has different properties: reliability, latency, etc. In this exercise we’ll only need to deal with control endpoints.

All USB devices must use “endpoint 0” as the default control endpoint. “Endpoint 0” actually refers to two endpoints: endpoint 0 IN and endpoint 0 OUT. This endpoint pair is used to establish a control pipe, a bidirectional communication channel between the host and device where data is exchanged using a predefined format. The default control pipe over endpoint 0 is mandatory: it must always be present and must always be active.
Going back to our enumeration steps, we are expecting the host to request our Device Descriptor using a GET_DESCRIPTOR request sent over the control pipe. Later, we will expect the device to send us a SET_ADDRESS request, giving us our new USB address - again, over the control pipe.
For detailed information about endpoints check Section 5.3.1 Device Endpoints, in the USB 2.0 specification. Or you can look at Chapter 3 of USB In a Nutshell.
USB Control Transfers
Before we continue we need to discuss how data transfers work under the USB protocol.
The control pipe handles control transfers, a special kind of data transfer used by the host to issue requests. A control transfer is a data transfer that occurs in three stages: a SETUP stage, an optional DATA stage and a STATUS stage. The device must handle these requests by either supplying the requested data, or performing the requested action.
During the SETUP stage the host sends 8 bytes of data that identify the control request. Depending on the issued request there may be a DATA stage or not; during the DATA stage data is transferred either from the device to the host or the other way around. During the STATUS stage the device acknowledges, or not, the whole control request.
For detailed information about control transfers see Chapter 4 of USB In a Nutshell.
In this exercise, we expect the host to perform a control transfer to find out what kind of device we are.
USB-2: SETUP Stage
At the end of program usb-1 we received a EP0SETUP event. This event signals the end of the SETUP stage of a control transfer. The nRF52840 USBD peripheral will automatically receive the SETUP data and store it in the registers BMREQUESTTYPE, BREQUEST, WVALUE{L,H}, WINDEX{L,H} and WLENGTH{L,H}.
In nrf52-code/usb-app/src/bin/usb-2.rs, you will find a short description of each register above the variable into which it should be read. But before we read those registers, we need to write some parsing code and get it unit tested.
For in-depth register documentation, refer to Sections 6.35.13.31 to 6.35.13.38 of the nRF52840 Product Specification.
Writing a parser for the data of this SETUP stage
We could parse the SETUP data inside our application, but it makes more sense to put the code in a library where we can test it, and where we can share it with other applications.
We have provided just such a library in nrf52-code/usb-lib. But it’s missing some important parts that you need to complete. The definition of Descriptor::Configuration as well as the associated test has been “commented out” using an #[cfg(TODO)] attribute because it is not handled by the firmware yet - leave those disabled for the time being.
✅ Run cargo test in the nrf52-code/usb-lib directory.
When you need to write some no_std code that does not involve device-specific I/O you should consider writing it as a separate crate. This way, you can test it on your development machine (e.g. x86_64) using the standard cargo test functionality.
So that’s what we’ll do here. In nrf52-code/usb-lib/src/lib.rs you’ll find starter code for writing a no_std SETUP data parser. The starter code contains some unit tests; you can run them with cargo test (from within the usb-lib folder) or you can use Rust Analyzer’s “Test” button in VS code.
You should see:
running 2 tests
test tests::set_address ... ok
test tests::get_descriptor_device ... FAILED
failures:
---- tests::get_descriptor_device stdout ----
thread 'tests::get_descriptor_device' panicked at src/lib.rs:119:9:
assertion `left == right` failed
left: Err(UnknownRequest)
right: Ok(GetDescriptor { descriptor: Device, length: 18 })
note: run with `RUST_BACKTRACE=1` environment variable to display a backtrace
failures:
tests::get_descriptor_device
test result: FAILED. 1 passed; 1 failed; 0 ignored; 0 measured; 0 filtered out; finished in 0.00s
error: test failed, to rerun pass `--lib`
✅ Fix the tests by parsing GET_DESCRIPTOR requests for DEVICE descriptors.
Modify Request::parse() in nrf52-code/usb-lib/src/lib.rs to recognize a GET_DESCRIPTOR request of type DEVICE so that the get_descriptor_device test passes. Note that the parser already handles SET_ADDRESS requests.
Description of GET_DESCRIPTOR request
We can recognize a GET_DESCRIPTOR request by the following properties:
bmRequestTypeis 0b10000000bRequestis 6 (i.e. the GET_DESCRIPTOR Request Code, defined in table 9-4 in the USB spec)
Description of GET_DESCRIPTOR requests for DEVICE descriptors
In this step of the exercise, we only need to parse DEVICE descriptor requests. They have the following properties:
- the descriptor type is 1 (i.e. DEVICE, defined in table 9-5 of the USB spec)
- the descriptor index is 0
- the wIndex is 0 for our purposes
- ❗️you need to fetch the descriptor type from the high byte of
wValue, and the descriptor index from the the low byte ofwValue
Check Section 9.4.3 of the USB specification for a very detailed description of the requests. All the constants we’ll be using are also described in Tables 9-3, 9-4 and 9-5 of the same document. Or, you can refer to Chapter 6 of USB In a Nutshell.
You should return Err(Error::xxx) if the properties aren’t met.
🔎 Remember that you can:
- define binary literals by prefixing them with
0b - use bit shifts (
>>) and casts (as u8) to get the high/low bytes ofwValue
You will also find this information in the // TODO implement ... comment in the Request::parse() function of lib.rs file.
See nrf52-code/usb-lib-solutions/get-device/src/lib.rs for a solution.
Using our new parser
✅ Read incoming request information and pass it to the parser:
Modify nrf52-code/usb-app/src/bin/usb-2.rs to read the appropriate USBD registers and parse them when an EP0SETUP event is received.
Getting Started:
-
for a mapping of register names to the
USBDAPI, check the entry fornrf52840_hal::target::usbdin the documentation you created usingcargo doc -
Try
let value = usbd.register_name.read().bits() as u8;if you just want the bottom eight bits of a register. -
remember that we’ve learned how to read registers in
events.rs. -
you will need to put together the higher and lower bits of
wlength,windexandwvalueto get the whole field, or use a library function to do it for you. Can thedkcrate help? -
Note: If you’re using a Mac, you need to catch
SET_ADDRESSrequests returned by the parser as these are sent before the firstGET_DESCRIPTORrequest. We added an empty handler for you already so there’s nothing further to do (we’re just explaining why it’s there).
Expected Result:
When you have successfully received a GET_DESCRIPTOR request for a Device descriptor you are done. You should see an output like this:
00:00:00.215576 [INFO ] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 64, windex: 0x0000, wvalue: 0x0100 (usb_2 src/bin/usb-2.rs:72)
00:00:00.215637 [INFO ] GET_DESCRIPTOR Device [length=64] (usb_2 src/bin/usb-2.rs:91)
Goal reached; move to the next section
`dk::exit()` called; exiting ...
Note:
wlength/lengthcan vary depending on the OS, USB port (USB 2.0 vs USB 3.0) or the presence of a USB hub so you may see a different value.
You can find a solution to this step in nrf52-code/usb-app-solutions/src/bin/usb-2.rs.
USB Device Descriptors

After receiving a GET_DESCRIPTOR request during the SETUP stage, the device needs to respond with the actual descriptor data during the DATA stage. In our Rust application, this descriptor will be generated using some library code and serialised into an array of bytes which we can give to the USBD peripheral.
A descriptor is a binary encoded data structure sent by the device to the host. The device descriptor, in particular, contains information about the device, like its product and vendor identifiers and how many configurations it has. The format of the device descriptor is specified in Section 9.6.1 of the USB specification.
As far as the enumeration process goes, the most relevant fields of the device descriptor are the number of configurations and bcdUSB, the version of the USB specification the devices adheres to. In bcdUSB you should report compatibility with USB 2.0.
What about (the number of) configurations?
A configuration is akin to an operation mode. USB devices usually have a single configuration that will be the only mode in which they’ll operate, for example a USB mouse will always act as a USB mouse. Some devices, though, may provide a second configuration for the purpose of firmware upgrades. For example a printer may enter DFU (Device Firmware Upgrade) mode, a second configuration, so that a user can update its firmware; while in DFU mode the printer will not provide printing functionality.
The specification mandates that a device must have at least one available configuration so we can report a single configuration in the device descriptor.
You can read more about Device Descriptors in Chapter 5 of USB In a Nutshell.
USB-3: DATA Stage
The next step is to respond to the GET_DESCRIPTOR request for our device descriptor, with an actual device descriptor that describes our USB Device.
Handle the request
✅ Open the nrf52-code/usb-app/src/bin/usb-3.rs file
Part of this response is already implemented. We’ll go through this.
We’ll use the dk::usb::Ep0In abstraction. An instance of it is available in the board value (inside the #[init] function). The first step is to make this Ep0In instance available to the on_event function.
The Ep0In API has two methods: start and end. start is used to start a DATA stage; this method takes a slice of bytes ([u8]) as argument; this argument is the response data. The end method needs to be called after start, when the EP0DATADONE event is raised, to complete the control transfer. Ep0In will automatically issue the STATUS stage that must follow the DATA stage.
✅ Handle the EP0DATADONE event
Do this by calling the end method on the EP0In instance.
✅ Implement the response to the GET_DESCRIPTOR request for device descriptors.
Extend nrf52-code/usb-app/src/bin/usb-3.rs so that it uses Ep0In to respond to the GET_DESCRIPTOR request (but only for device descriptors - no other kind of descriptor).
Values of the device descriptor
The raw values you need to pack into the descriptor are as follows. Note, we won’t be doing this by hand, so read on before you start typing!
bLength = 18, the size of the descriptor (must always be this value)bDescriptorType = 1, device descriptor type (must always be this value)bDeviceClass = bDeviceSubClass = bDeviceProtocol = 0, these are unimportant for enumerationbMaxPacketSize0 = 64, this is the most performant option (minimizes exchanges between the device and the host) and it’s assumed by theEp0InabstractionidVendor = consts::USB_VID_DEMO, our example’s USB Vendor ID (*)idProduct = consts::USB_PID_RTIC_DEMO, our example’s USB Product ID (*)bcdDevice = 0x0100, this means version 1.0 but any value should doiManufacturer = iProduct = iSerialNumber = None, string descriptors not supportedbNumConfigurations = 1, must be at least1so this is the minimum value
(*) the
constscrate refers to the crate in thenrf52-code/constsfolder. It is already part of theusb-appcrate dependencies.
Use the usb2::device::Descriptor abstraction
Although you can create the device descriptor by hand as an array filled with magic values we strongly recommend you use the usb2::device::Descriptor abstraction. The crate is already in the dependency list of the project; browse to the usb2 crate in the cargo doc output you opened earlier.
The length of the device descriptor
The usb2::device::Descriptor struct does not have bLength and bDescriptorType fields. Those fields have fixed values according to the USB spec so you cannot modify or set them. When bytes() is called on the Descriptor value the returned array, the binary representation of the descriptor, will contain those fields set to their correct value.
The device descriptor is 18 bytes long but the host may ask for fewer bytes (see wlength field in the SETUP data). In that case you must respond with the amount of bytes the host asked for. The opposite may also happen: wlength may be larger than the size of the device descriptor; in this case your answer must be 18 bytes long (do not pad the response with zeroes).
Expected log output
Once you have successfully responded to the GET_DESCRIPTOR Device request you should get logs like these (if you are logging like our solution does):
00:00:00.367980 [INFO ] GET_DESCRIPTOR Device [length=64] (usb_3 src/bin/usb-3.rs:86)
00:00:00.368835 [ERROR] panicked at src/bin/usb-3.rs:60:34:
not yet implemented (usb_app src/lib.rs:8)
`dk::fail()` called; exiting ...
A solution to this exercise can be found in nrf52-code/usb-app-solutions/src/bin/usb-3.rs.
Configuration descriptor

The configuration descriptor describes one of the device configurations to the host. The descriptor contains the following information about a particular configuration:
- the total length of the configuration: this is the number of bytes required to transfer this configuration descriptor and the interface and endpoint descriptors associated to it
- its number of interfaces – must be >= 1
- its configuration value – this is not an index and can be any non-zero value
- whether the configuration is self-powered
- whether the configuration supports remote wakeup
- its maximum power consumption
The full format of the configuration descriptor is specified in section 9.6.3, Configuration, of the USB specification.
USB-4: Supporting more Standard Requests
After responding to the GET_DESCRIPTOR Device request the host will start sending different requests. Let’s identify those, and then handle them.
Update the parser
The starter nrf52-code/usb-lib package contains unit tests for everything we need. Some of them have been commented out using a #[cfg(TODO)] attribute.
✅ Remove all #[cfg(TODO)] attributes so that everything is enabled.
✅ Update the parser in nrf52-code/usb-lib to handle GET_DESCRIPTOR requests for Configuration Descriptors.
When the host issues a GET_DESCRIPTOR Configuration request the device needs to respond with the requested configuration descriptor plus all the interface and endpoint descriptors associated to that configuration descriptor during the DATA stage.
As a reminder, all GET_DESCRIPTOR request types share the following properties:
bmRequestTypeis 0b10000000bRequestis 6 (i.e. the GET_DESCRIPTOR Request Code, defined in Table 9-4 of the USB specification)
A GET_DESCRIPTOR Configuration request is determined by the high byte of its wValue field:
- The high byte of
wValueis 2 (i.e. theCONFIGURATIONdescriptor type, defined in Table 9-5 of the USB specification)
✅ Update the parser in nrf52-code/usb-lib to handle SET_CONFIGURATION requests.
See the section on SET_CONFIGURATION for details on how to do this.
Once you’ve completed this, all your test cases should pass. If not, fix the code until they do!
Help
If you need a reference, you can find solutions to parsing GET_DESCRIPTOR Configuration and SET_CONFIGURATION requests in the following files:
Each file contains just enough code to parse the request in its name and the GET_DESCRIPTOR Device and SET_ADDRESS requests. So you can refer to nrf52-code/usb-lib-solutions/get-descriptor-config without getting “spoiled” about how to parse the SET_CONFIGURATION request.
Update the application
We’re now going to be using nrf52-code/usb-app/src/bin/usb-4.rs.
Since the logic of the EP0SETUP event handling is getting more complex with each added event, you can see that usb-4.rs was refactored to add error handling: the event handling now happens in a separate function that returns a Result. When it encounters an invalid host request, it returns the Err variant which can be handled by stalling the endpoint:
fn on_event(/* parameters */) {
match event {
/* ... */
Event::UsbEp0Setup => {
if ep0setup(/* arguments */).is_err() {
// unsupported or invalid request:
// TODO add code to stall the endpoint
defmt::warn!("EP0IN: unexpected request; stalling the endpoint");
}
}
}
}
fn ep0setup(/* parameters */) -> Result<(), ()> {
let req = Request::parse(/* arguments_*/)?;
// ^ early returns an `Err` if it occurs
// TODO respond to the `req`; return `Err` if the request was invalid in this state
Ok(())
}Note that there’s a difference between the error handling done here and the error handling commonly done in std programs. std programs usually bubble up errors to the top main function (using the ? operator), report the error (or chain of errors) and then exit the application with a non-zero exit code. This approach is usually not appropriate for embedded programs as
maincannot return,- there may not be a console to print the error to and/or
- stopping the program, and e.g. requiring the user to reset it to make it work again, may not be desirable behavior.
For these reasons in embedded software errors tend to be handled as early as possible rather than propagated all the way up.
This does not preclude error reporting. The above snippet includes error reporting in the form of a defmt::warn! statement. This log statement may not be included in the final release of the program as it may not be useful, or even visible, to an end user but it is useful during development.
✅ For each green test, extend usb-4.rs to handle the new requests your parser is now able to recognize.
If that’s all the information you need - go ahead! If you’d like some more detail, read on.
Dealing with unknown requests: Stalling the endpoint
You may come across host requests other than the ones listed in previous sections.
For this situation, the USB specification defines a device-side procedure for “stalling an endpoint”, which amounts to the device telling the host that it doesn’t support some request.
This procedure should be used to deal with invalid requests, requests whose
SETUPstage doesn’t match any USB 2.0 standard request, and requests not supported by the device – for instance theSET_DESCRIPTORrequest is not mandatory.
✅ Use the dk::usbd::ep0stall() helper function to stall endpoint 0 in nrf52-code/usb-app/src/bin/usb-4.rs if an invalid request is received.
Updating Device State
At some point during the initialization you’ll receive a SET_ADDRESS request that will move the device from the Default state to the Address state. If you are working on Linux, you’ll also receive a SET_CONFIGURATION request that will move the device from the Address state to the Configured state. Additionally, some requests are only valid in certain states– for example SET_CONFIGURATION is only valid if the device is in the Address state. For this reason usb-4.rs will need to keep track of the device’s current state.
The device state should be tracked using a resource so that it’s preserved across multiple executions of the USBD event handler. The usb2 crate has a State enum with the 3 possible USB states: Default, Address and Configured. You can use that enum or roll your own.
✅ Start tracking and updating the device state to move your request handling forward.
Update the handling of the USBRESET event
Instead of ignoring it, we now want it to change the state of the USB device. See section 9.1 USB Device States of the USB specification for details on what to do. Note that fn on_event() was given state: &mut State.
Update the handling of SET_ADDRESS requests
This request should come right after the
GET_DESCRIPTOR Devicerequest if you’re using Linux, or be the first request sent to the device by macOS.
A SET_ADDRESS request has the following fields as defined by Section 9.4.6 Set Address of the USB spec:
bmrequesttypeis 0b00000000brequestis 5 (i.e. the SET_ADDRESS Request Code, see table 9-4 in the USB spec)wValuecontains the address to be used for all subsequent accesseswIndexandwLengthare 0, there is nowData
It should be handled as follows:
-
If the device is in the
Defaultstate, then- if the requested address stored in
wValuewas0(Nonein theusbAPI) then the device should stay in theDefaultstate - otherwise the device should move to the
Addressstate
- if the requested address stored in
-
If the device is in the
Addressstate, then- if the requested address stored in
wValuewas0(Nonein theusbAPI) then the device should return to theDefaultstate - otherwise the device should remain in the
Addressstate but start using the new address
- if the requested address stored in
-
If the device is in the
Configuredstate this request results in “unspecified” behavior according to the USB specification. You should stall the endpoint in this case.
Note: According to the USB specification the device needs to respond to this request with a STATUS stage – the DATA stage is omitted. The nRF52840 USBD peripheral will automatically issue the STATUS stage and switch to listening to the requested address (see the USBADDR register) so no interaction with the USBD peripheral is required for this request.
For more details, read the introduction of section 6.35.9 of the nRF52840 Product Specification 1.0.
Implement the handling of GET_DESCRIPTOR Configuration requests
So how should we respond to the host when it wants our Configuration Descriptor? As our only goal is to be enumerated we’ll respond with the minimum amount of information possible.
✅ First, check the request
Configuration descriptors are requested by index, not by their configuration value. Since we reported a single configuration in our device descriptor the index in the request must be zero. Any other value should be rejected by stalling the endpoint (see section Dealing with unknown requests: Stalling the endpoint for more information).
✅ Next, create and send a response
The response should consist of the configuration descriptor, followed by interface descriptors and then by (optional) endpoint descriptors. We’ll include a minimal single interface descriptor in the response. Since endpoints are optional we will include none.
The configuration descriptor and one interface descriptor will be concatenated in a single packet so this response should be completed in a single DATA stage.
The configuration descriptor in the response should contain these fields:
wTotalLength = 18= one configuration descriptor (9 bytes) and one interface descriptor (9 bytes)bNumInterfaces = 1, a single interface (the minimum value)bConfigurationValue = 42, any non-zero value will doiConfiguration = 0, string descriptors are not supportedbmAttributes { self_powered: true, remote_wakeup: false }, self-powered due to the debugger connectionbMaxPower = 250(500 mA), this is the maximum allowed value but any (non-zero?) value should do
The interface descriptor in the response should contain these fields:
bInterfaceNumber = 0, this is the first, and only, interfacebAlternateSetting = 0, alternate settings are not supportedbNumEndpoints = 0, no endpoint associated to this interface (other than the control endpoint)bInterfaceClass = bInterfaceSubClass = bInterfaceProtocol = 0, does not adhere to any specified USB interfaceiInterface = 0, string descriptors are not supported
Again, we strongly recommend that you use the usb2::configuration::Descriptor and usb2::interface::Descriptor abstractions here. Each descriptor instance can be transformed into its byte representation using the bytes method – the method returns an array. To concatenate both arrays you can use an stack-allocated heapless::Vec buffer. If you haven’t used the heapless crate before you can find example usage in the the src/bin/vec.rs file.
NOTE: the
usb2::configuration::Descriptorandusb2::interface::Descriptorstructs do not havebLengthandbDescriptorTypefields. Those fields have fixed values according to the USB spec so you cannot modify or set them. Whenbytes()is called on theDescriptorvalue, the returned array (which contains a binary representation of the descriptor, packed according to the USB 2.0 standard) will contain those fields set to their correct value.
Getting it Configured
At this stage the device will be in the Address stage. It has been identified and enumerated by the host but cannot yet be used by host applications. The device must first move to the Configured state before the host can start, for example, HID communication or send non-standard requests over the control endpoint.
There is no template for this step - start with your solution to USB-4.
Windows will enumerate the device but not automatically configure it after enumeration. Here’s what you should do to force the host to configure the device.
Linux and macOS
Nothing extra needs to be done if you’re working on a Linux or macOS host. The host will automatically send a SET_CONFIGURATION request so proceed to the SET_CONFIGURATION section to see how to handle the request.
Windows
Now modify the usb-descriptors command within the xtask package to “open” the device – this operation is commented out in the source code. With this modification usb-descriptors will cause Windows to send a SET_CONFIGURATION request to configure the device. You’ll need to run cargo xtask usb-descriptors to test out the correct handling of the SET_CONFIGURATION request.
SET_CONFIGURATION
The SET_CONFIGURATION request is sent by the host to configure the device. Its configuration according to Section 9.4.7 of the USB specification is:
bmrequesttypeis 0b00000000brequestis 9 (i.e. the SET_CONFIGURATION Request Code, see table 9-4 in the USB spec)wValuecontains the requested configuration valuewIndexandwLengthare 0, there is nowData
✅ To handle a SET_CONFIGURATION, do the following:
-
If the device is in the
Defaultstate, you should stall the endpoint because the operation is not permitted in that state. -
If the device is in the
Addressstate, then- if
wValueis 0 (Nonein theusbAPI) then stay in theAddressstate - if
wValueis non-zero and valid (was previously reported in a configuration descriptor) then move to theConfiguredstate - if
wValueis not valid then stall the endpoint
- if
-
If the device is in the
Configuredstate, then read the requested configuration value fromwValue- if
wValueis 0 (Nonein theusbAPI) then return to theAddressstate - if
wValueis non-zero and valid (was previously reported in a configuration descriptor) then move to theConfiguredstate with the new configuration value - if
wValueis not valid then stall the endpoint
- if
In all the cases where you did not stall the endpoint (by returning Err) you’ll need to acknowledge the request by starting a STATUS stage.
✅ This is done by writing 1 to the TASKS_EP0STATUS register.
NOTE: On Windows, you may get a GET_STATUS request before the SET_CONFIGURATION request and although you should respond to it, stalling the GET_STATUS request seems sufficient to get the device to the Configured state.
Expected output
✅ Run the program and check the log output.
Once you are correctly handling the SET_CONFIGURATION request you should get logs like these:
[DEBUG] Initializing the board (dk dk/src/lib.rs:312)
[DEBUG] Clocks configured (dk dk/src/lib.rs:330)
[DEBUG] RTC started (dk dk/src/lib.rs:349)
[DEBUG] I/O pins have been configured for digital output (dk dk/src/lib.rs:359)
[DEBUG] USB: UsbReset @ 00:00:00.324523 (usb_5 src/bin/usb-5.rs:56)
[WARN ] USB reset condition detected (usb_5 src/bin/usb-5.rs:60)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.367462 (usb_5 src/bin/usb-5.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b00000000, brequest: 5, wlength: 0, windex: 0x0000, wvalue: 0x000b (usb_5 src/bin/usb-5.rs:88)
[INFO ] EP0: SetAddress { address: Some(11) } (usb_5 src/bin/usb-5.rs:99)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.370758 (usb_5 src/bin/usb-5.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 8, windex: 0x0000, wvalue: 0x0100 (usb_5 src/bin/usb-5.rs:88)
[INFO ] EP0: GetDescriptor { descriptor: Device, length: 8 } (usb_5 src/bin/usb-5.rs:99)
[DEBUG] EP0IN: start 8B transfer (dk dk/src/usbd.rs:59)
[DEBUG] USB: UsbEp0DataDone @ 00:00:00.371337 (usb_5 src/bin/usb-5.rs:56)
[INFO ] EP0IN: transfer complete (usb_5 src/bin/usb-5.rs:65)
[INFO ] EP0IN: transfer done (dk dk/src/usbd.rs:83)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.371917 (usb_5 src/bin/usb-5.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 18, windex: 0x0000, wvalue: 0x0100 (usb_5 src/bin/usb-5.rs:88)
[INFO ] EP0: GetDescriptor { descriptor: Device, length: 18 } (usb_5 src/bin/usb-5.rs:99)
[DEBUG] EP0IN: start 18B transfer (dk dk/src/usbd.rs:59)
[DEBUG] USB: UsbEp0DataDone @ 00:00:00.372497 (usb_5 src/bin/usb-5.rs:56)
[INFO ] EP0IN: transfer complete (usb_5 src/bin/usb-5.rs:65)
[INFO ] EP0IN: transfer done (dk dk/src/usbd.rs:83)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.373046 (usb_5 src/bin/usb-5.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 9, windex: 0x0000, wvalue: 0x0200 (usb_5 src/bin/usb-5.rs:88)
[INFO ] EP0: GetDescriptor { descriptor: Configuration { index: 0 }, length: 9 } (usb_5 src/bin/usb-5.rs:99)
[DEBUG] EP0IN: start 9B transfer (dk dk/src/usbd.rs:59)
[DEBUG] USB: UsbEp0DataDone @ 00:00:00.373748 (usb_5 src/bin/usb-5.rs:56)
[INFO ] EP0IN: transfer complete (usb_5 src/bin/usb-5.rs:65)
[INFO ] EP0IN: transfer done (dk dk/src/usbd.rs:83)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.373901 (usb_5 src/bin/usb-5.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 18, windex: 0x0000, wvalue: 0x0200 (usb_5 src/bin/usb-5.rs:88)
[INFO ] EP0: GetDescriptor { descriptor: Configuration { index: 0 }, length: 18 } (usb_5 src/bin/usb-5.rs:99)
[DEBUG] EP0IN: start 18B transfer (dk dk/src/usbd.rs:59)
[DEBUG] USB: UsbEp0DataDone @ 00:00:00.374603 (usb_5 src/bin/usb-5.rs:56)
[INFO ] EP0IN: transfer complete (usb_5 src/bin/usb-5.rs:65)
[INFO ] EP0IN: transfer done (dk dk/src/usbd.rs:83)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.379211 (usb_5 src/bin/usb-5.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b00000000, brequest: 9, wlength: 0, windex: 0x0000, wvalue: 0x002a (usb_5 src/bin/usb-5.rs:88)
[INFO ] EP0: SetConfiguration { value: Some(42) } (usb_5 src/bin/usb-5.rs:99)
[INFO ] entering the configured state (usb_5 src/bin/usb-5.rs:198)
These logs are from a Linux host. You can find traces for other OSes in these files (they are in the nrf52-code/usb-app-solutions/traces folder):
linux-configured.txtwin-configured.txt, this file only contains the logs produced by runningcargo xtask usb-descriptorsmacos-configured.txt(same logs as the ones shown above)
You can find a solution to this part of the exercise in nrf52-code/usb-app-solutions/src/bin/usb-5.rs.
Idle State
Once you have handled all the previously covered requests the device should be enumerated and remain idle awaiting for a new host request. Your logs may look like this:
[DEBUG] USB: UsbReset @ 00:00:00.347259 (usb_4 src/bin/usb-4.rs:56)
[WARN ] USB reset condition detected (usb_4 src/bin/usb-4.rs:60)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.389770 (usb_4 src/bin/usb-4.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b00000000, brequest: 5, wlength: 0, windex: 0x0000, wvalue: 0x000a (usb_4 src/bin/usb-4.rs:88)
[INFO ] EP0: SetAddress { address: Some(10) } (usb_4 src/bin/usb-4.rs:99)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.393066 (usb_4 src/bin/usb-4.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 8, windex: 0x0000, wvalue: 0x0100 (usb_4 src/bin/usb-4.rs:88)
[INFO ] EP0: GetDescriptor { descriptor: Device, length: 8 } (usb_4 src/bin/usb-4.rs:99)
[DEBUG] EP0IN: start 8B transfer (dk dk/src/usbd.rs:59)
[DEBUG] USB: UsbEp0DataDone @ 00:00:00.393585 (usb_4 src/bin/usb-4.rs:56)
[INFO ] EP0IN: transfer complete (usb_4 src/bin/usb-4.rs:65)
[INFO ] EP0IN: transfer done (dk dk/src/usbd.rs:83)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.394409 (usb_4 src/bin/usb-4.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 18, windex: 0x0000, wvalue: 0x0100 (usb_4 src/bin/usb-4.rs:88)
[INFO ] EP0: GetDescriptor { descriptor: Device, length: 18 } (usb_4 src/bin/usb-4.rs:99)
[DEBUG] EP0IN: start 18B transfer (dk dk/src/usbd.rs:59)
[DEBUG] USB: UsbEp0DataDone @ 00:00:00.394958 (usb_4 src/bin/usb-4.rs:56)
[INFO ] EP0IN: transfer complete (usb_4 src/bin/usb-4.rs:65)
[INFO ] EP0IN: transfer done (dk dk/src/usbd.rs:83)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.395385 (usb_4 src/bin/usb-4.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 9, windex: 0x0000, wvalue: 0x0200 (usb_4 src/bin/usb-4.rs:88)
[INFO ] EP0: GetDescriptor { descriptor: Configuration { index: 0 }, length: 9 } (usb_4 src/bin/usb-4.rs:99)
[DEBUG] EP0IN: start 9B transfer (dk dk/src/usbd.rs:59)
[DEBUG] USB: UsbEp0DataDone @ 00:00:00.396057 (usb_4 src/bin/usb-4.rs:56)
[INFO ] EP0IN: transfer complete (usb_4 src/bin/usb-4.rs:65)
[INFO ] EP0IN: transfer done (dk dk/src/usbd.rs:83)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.396270 (usb_4 src/bin/usb-4.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b10000000, brequest: 6, wlength: 18, windex: 0x0000, wvalue: 0x0200 (usb_4 src/bin/usb-4.rs:88)
[INFO ] EP0: GetDescriptor { descriptor: Configuration { index: 0 }, length: 18 } (usb_4 src/bin/usb-4.rs:99)
[DEBUG] EP0IN: start 18B transfer (dk dk/src/usbd.rs:59)
[DEBUG] USB: UsbEp0DataDone @ 00:00:00.396942 (usb_4 src/bin/usb-4.rs:56)
[INFO ] EP0IN: transfer complete (usb_4 src/bin/usb-4.rs:65)
[INFO ] EP0IN: transfer done (dk dk/src/usbd.rs:83)
[DEBUG] USB: UsbEp0Setup @ 00:00:00.401824 (usb_4 src/bin/usb-4.rs:56)
[DEBUG] SETUP: bmrequesttype: 0b00000000, brequest: 9, wlength: 0, windex: 0x0000, wvalue: 0x002a (usb_4 src/bin/usb-4.rs:88)
[INFO ] EP0: SetConfiguration { value: Some(42) } (usb_4 src/bin/usb-4.rs:99)
[WARN ] EP0IN: unexpected request; stalling the endpoint (usb_4 src/bin/usb-4.rs:71)
Note that these logs are from a macOS host where a SET_ADDRESS request is sent first, and then a GET_DESCRIPTOR request. On other OSes the messages may be in a different order. Also note that there are some GET_DESCRIPTOR DeviceQualifier requests in this case; you do not need to parse them in the usb crate as they’ll be rejected (stalled) anyways.
You can find traces for other OSes in these files (they are in the nrf52-code/usb-app-solutions/traces folder):
linux-enumeration.txtmacos-enumeration.txt(same logs as the ones shown above)win-enumeration.txt
✅ Double check that the enumeration works by running cargo xtask usb-list while usb-4.rs is running.
$ cargo xtask usb-list
(...) random other USB devices will be listed
Bus 004 Device 001: ID 1209:0717 <-- nRF52840 on the nRF52840 Development Kit
You can also try cyme, but we’ve found that on Windows, the device may not appear in the tool’s output. Possibly this is because it’s only showing devices which have accepted a Configuration.
You can find a working solution up to this point in nrf52-code/usb-app-solutions/src/bin/usb-4.rs. Note that the solution uses the usb2 crate to parse SETUP packets and that crate supports parsing all standard requests.
Next Steps
String descriptors
If you’d like to continue working on your project, we recommend adding String Descriptors support to the USB firmware. To do this, follow these steps:
✅ Read through section 9.6.7 of the USB spec, which covers string descriptors.
✅ Change your configuration descriptor to use string descriptors. You’ll want to change the iConfiguration field to a non-zero value. Note that this change will likely break enumeration.
✅ Re-run the program to see what new control requests you get from the host.
✅ Update the usb parser to handle the new requests.
✅ Extend the logic of ep0setup to handle these new requests.
Eventually, you’ll need to send a string descriptor to the host. Note here that Rust string literals are UTF-8 encoded but the USB protocol uses UTF-16 strings. You’ll need to convert between these formats.
✅ If this works, add strings to other descriptors like the device descriptor e.g. its iProduct field.
✅ To verify that string descriptors are working in a cross-platform way, extend the cargo xtask usb-descriptors program to also print the device’s string descriptors. See the read_string_descriptor method but note that this must be called on a “device handle”, which is what the commented out open operation does.
Explore more RTIC features
We have covered only a few of the core features of the RTIC framework but the framework has many more features like software tasks, tasks that can be spawned by the software; message passing between tasks; and task scheduling, which allows the creation of periodic tasks. We encourage to check the RTIC book which describes the features we haven’t covered here.
usb-device
usb-device is a library for building USB devices. It has been built using traits (the pillar of Rust’s generics) such that USB interfaces like HID and TTY ACM can be implemented in a device agnostic manner. The device details then are limited to a trait implementation. There’s an implementation of the usb-device trait for the nRF52840 device in the nrf-hal and there are many usb-device “classes” like HID and TTY ACM that can be used with that trait implementation. We encourage you to check out that implementation, test it on different OSes and report issues, or contribute fixes, to the usb-device ecosystem.
Extra Info
The following chapters contain extra detail about DMA on the nRF52, the USB stack, and how we protect against stack overflows. You do not require them to complete the exercises, but you may find them interesting reading.
The USB Specification
The USB 2.0 specification is available free of charge from https://www.usb.org/document-library/usb-20-specification. On the right, you will see a link like usb_20_yyyymmdd.zip. Download and unpack the zip file, and the core specification can be found within as a file called usb_20.pdf (alongside a bunch of errata and additional specifications). Note that the date on the cover page is April 27, 2000 - and actually, the portions of the specification we are implementing are unchanged from the earlier USB 1.1 specification.
Direct Memory Access
🔎 this section covers the implementation of the Ep0In abstraction; it’s not necessary to fully understand this section to continue working on the exercise.
Let’s zoom into the Ep0In abstraction we used in usb-3.rs.
✅ Open the file. Use VSCode’s “Go to Definition” to see the implementation of the Ep0In::start() method.
This is how data transfers over USB work on the nRF52840: for each endpoint there’s a buffer in the USBD peripheral. Data sent by the host over USB to a particular endpoint will be stored in the corresponding endpoint buffer. Likewise, data stored in one of these endpoint buffers can be send to the host over USB from that particular endpoint. These buffers are not directly accessible by the CPU but data stored in RAM can be copied into these buffers; likewise, the contents of an endpoint buffer can be copied into RAM. A second peripheral, the Direct Memory Access (DMA) peripheral, can copy data between these endpoint buffers and RAM. The process of copying data in either direction is referred to as “a DMA transfer”.
What the start method does is start a DMA transfer to copy bytes into endpoint buffer IN 0; this makes the USBD peripheral send data to the host from endpoint IN 0 fs. The data (bytes), which may be located in Flash or RAM, is first copied into an internal buffer, allocated in RAM, and then the DMA is configured to move the data from this internal buffer to endpoint buffer 0 IN, which is part of the USBD peripheral.
The signature of the start() method does not ensure that:
byteswon’t be deallocated before the DMA transfer is over (e.g.bytescould be pointing into the stack), or thatbyteswon’t be modified right after the DMA transfer starts (this would be a data race in the general case).
For these two safety reasons the API is implemented using an internal buffer called buffer. The internal buffer has a 'static lifetime so it’s guaranteed to never be deallocated – this prevents issue (a). The busy flag prevents any further modification to the internal buffer – from the public API – while the DMA transfer is in progress.
Apart from thinking about lifetimes and explicit data races in the surface API one must internally use memory fences to prevent reordering of memory operations (e.g. by the compiler), which can also cause data races. DMA transfers run in parallel to the instructions performed by the processor and are “invisible” to the compiler.
In the implementation of the start method, data is copied from bytes to the internal buffer (a memcpy() operation) and then the DMA transfer is started with a write to the TASKS_STARTEPIN0 register. The compiler sees the start of the DMA transfer (register write) as an unrelated memory operation so it may move the memcpy() to after the DMA transfer has started. This reordering results in a data race: the processor modifies the internal buffer while the DMA is reading data out from it.
To avoid this reordering a memory fence, dma_start(), is used. The fence pairs with the store operation (register write) that starts the DMA transfer and prevents the previous memcpy(), and any other memory operation, from being move to after the store operation.
Another memory fence, dma_end(), is needed at the end of the DMA transfer. In the general case, this prevents instruction reordering that would result in the processor accessing the internal buffer before the DMA transfer has finished. This is particularly problematic with DMA transfers that modify a region of memory which the processor intends to read after the transfer.
Note: Not relevant to the DMA operation but relevant to the USB specification, the
start()method sets a shortcut in the USBD peripheral to issue a STATUS stage right after the DATA stage is finished. Thanks to this it is not necessary to manually start a STATUS stage after calling theendmethod.
SET_CONFIGURATION (Linux & macOS)
On Linux and macOS, the host will likely send a SET_CONFIGURATION request right after enumeration to put the device in the Configured state. For now you can stall the request. It is not necessary at this stage because the device has already been enumerated.
Interface
We have covered configurations and endpoints but what is an interface?

An interface is closest to a USB device’s function. For example, a USB mouse may expose a single HID (Human Interface Device) interface to report user input to the host. USB devices can expose multiple interfaces within a configuration. For example, the nRF52840 Dongle could expose both a CDC ACM interface (AKA virtual serial port) and a HID interface; the first interface could be used for (defmt::println!-style) logs; and the second one could provide a RPC (Remote Procedure Call) interface to the host for controlling the nRF52840’s radio.
An interface is made up of one or more endpoints. To give an example, a HID interface can use two (interrupt) endpoints, one IN and one OUT, for bidirectional communication with the host. A single endpoint cannot be used by more than one interface with the exception of the special “endpoint 0”, which can be (and usually is) shared by all interfaces.
For detailed information about interfaces check section 9.6.5, Interface, of the USB specification.
Interface descriptor
The interface descriptor describes one of the device interfaces to the host. The descriptor contains the following information about a particular interface:
- its interface number – this is a zero-based index
- its alternate setting – this allows configuring the interface
- its number of endpoints
- class, subclass and protocol – these define the interface (HID, or TTY ACM, or DFU, etc.) according to the USB specification
The number of endpoints can be zero and endpoint zero must not be accounted when counting endpoints.
The full format of the interface descriptor is specified in section 9.6.5, Interface, of the USB specification.
Endpoint descriptor

We will not need to deal with endpoint descriptors in this exercise but they are specified in section 9.6.6, Endpoint, of the USB specification.
Inspecting the Descriptors
There’s a tool built into our cargo xtask called usb-descriptors, it prints all the descriptors reported by your application
✅ Run this tool
Your output should look like this:
$ cargo xtask usb-descriptors
DeviceDescriptor {
bLength: 18,
bDescriptorType: 1,
bcdUSB: 512,
bDeviceClass: 0,
bDeviceSubClass: 0,
bDeviceProtocol: 0,
bMaxPacketSize: 64,
idVendor: 8224,
idProduct: 1815,
bcdDevice: 256,
iManufacturer: 0,
iProduct: 0,
iSerialNumber: 0,
bNumConfigurations: 1,
}
address: 22
config0: ConfigDescriptor {
bLength: 9,
bDescriptorType: 2,
wTotalLength: 18,
bNumInterfaces: 1,
bConfigurationValue: 42,
iConfiguration: 0,
bmAttributes: 192,
bMaxPower: 250,
extra: None,
}
iface0: [
InterfaceDescriptor {
bLength: 9,
bDescriptorType: 4,
bInterfaceNumber: 0,
bAlternateSetting: 0,
bNumEndpoints: 0,
bInterfaceClass: 0,
bInterfaceSubClass: 0,
bInterfaceProtocol: 0,
iInterface: 0,
},
]
The output above corresponds to the descriptor values we suggested. If you used different values, e.g. for bMaxPower, you’ll a slightly different output.
Stack Overflow Protection
The usb-app crate in which we developed our USB exercise solutions (i.e. nrf52-code/usb-app) uses our open-source flip-link tool for zero-cost stack overflow protection.
This means that your application will warn you by crashing if you accidentally overreach the boundaries of your application’s stack instead of running into undefined behavior and behaving erratically in irreproducible ways. This memory protection mechanism comes at no additional computational or memory-usage cost.
🔎 For a detailed description of how flip-link and Stack Overflows in bare metal Rust in general work, please refer to the flip-link README.
You can see this in action in the stack_overflow.rs file that can be found in nrf52-code/usb-app/src/bin/stack_overflow.rs:
#![no_main]
#![no_std]
use cortex_m::asm;
use cortex_m_rt::entry;
// this imports `src/lib.rs`to retrieve our global logger + panicking-behavior
use usb_app as _;
#[entry]
fn main() -> ! {
// board initialization
dk::init().unwrap();
fib(100);
loop {
asm::bkpt();
}
}
#[inline(never)]
fn fib(n: u32) -> u32 {
// allocate and initialize one kilobyte of stack memory to provoke stack overflow
let use_stack = [0xAA; 1024];
defmt::println!("allocating [{}; 1024]; round #{}", use_stack[1023], n);
if n < 2 {
1
} else {
fib(n - 1) + fib(n - 2) // recursion
}
}The spam() function allocates data on the stack until the stack boundaries are reached.
✅ Run stack_overflow.rs
You should see output similar to this (the program output between the horizontal bars might be missing):
(HOST) INFO flashing program (35.25 KiB)
(HOST) INFO success!
────────────────────────────────────────────────────────────────────────────────
INFO:stack_overflow -- provoking stack overflow...
INFO:stack_overflow -- address of current `use_stack` at recursion depth 0: 0x2003aec0
INFO:stack_overflow -- address of current `use_stack` at recursion depth 1: 0x20039e50
(...)
INFO:stack_overflow -- address of current `use_stack` at recursion depth 10: 0x20030a60
INFO:stack_overflow -- address of current `use_stack` at recursion
────────────────────────────────────────────────────────────────────────────────
stack backtrace:
0: HardFaultTrampoline
<exception entry>
(HOST) WARN call stack was corrupted; unwinding could not be completed
(HOST) ERROR the program has overflowed its stack
❗️ flip-link is a third-party tool (in fact it was written by Ferrous Systems as part of their Knurling Project), so make sure you’ve installed it through cargo install flip-link
To see how we’ve activated flip-link, take a look at nrf52-code/usb-app/.cargo/config.toml:
rustflags = [
"-C", "linker=flip-link", # adds stack overflow protection
#
]
There, we’ve configured flip-link as the linker to be used for all ARM targets. If you’d like to use flip-link in your own projects, this is all you need to add!
🔎 Note: if you try to run stack_overflow.rs without flip-link enabled, you might see varying behavior depending on the rustc version you’re using, timing and pure chance. This is because undefined behavior triggered by the program may change between rustc releases.
Working without the Standard Library
This section has some exercises which introduce ways to move away from libstd and write applications which only use libcore (or liballoc). This is important when writing safety-critical systems.
Replacing println!
In this exercise, we will write a basic “Hello, World!” application, but without using println!. This will introduce some of the concepts we will need for writing safety-critical Rust code that runs on certified OSes like QNX, where the Rust Standard Library is not available.
However, to keep things easy to deploy, you can use your normal Windows, macOS or Linux system to complete this exercise.
Task 1 - Make a program
Use cargo new to make a package containing the default binary crate - a Hello, World example that uses println!
Solution
$ cargo new testprogram
Created binary (application) `testbin` package
$ cd testprogram
$ cargo run
Compiling testbin v0.1.0 (/Users/jonathan/Documents/clients/training/oxidze-2024/testbin)
Finished dev [unoptimized + debuginfo] target(s) in 0.32s
Running `target/debug/testbin`
Hello, world!
Task 2 - Lock the Standard Out
The println! expands to some code which:
- Grabs a lock on standard out
- Formats the arguments into the locked standard out
We can do these two steps manually, using std::io::stdout(), and the writeln! (which is actually from in libcore).
Replace the call to println! with a call to writeln! that uses a locked standard out. Work out how best to handle the fact that writeln! returns an error. Think about why println! didn’t return an error? How it did handle a possible failure?
If you get an error about the write_fmt method not being available, make sure you have brought the std::io::Write trait into scope. Recall that trait methods are not available on types unless the trait is in scope - otherwise how would the compiler know which traits to look for the method in? If we were on a no-std system, the same method is available in the core::fmt::Write trait - the writeln! macro is happy with either as long as the method exists.
Solution
use std::io::Write;
fn main() {
let mut stdout = std::io::stdout();
writeln!(stdout, "Hello, World!").expect("writing to stdout");
}The writeln call can fail because the it can get an error from the object it is writing to. What if you are writing to a file on disk, and the disk is full? Or the USB Thumb Drive it is on is unplugged? The println! macro knows it only writes to Standard Out, and if that is broken, there isn’t much you can do about it (you probably can’t even print an error), so it just panics.
Task 3 - Call write_fmt
The writeln! call expands to some code which:
- Generates a value of type
std::fmt::Arguments, using a macro calledformat_args!. - Passes that to the
write_fmtmethod on whatever we’re writing into.
You can do these two steps manually - but that’s as far as we can go! The format_args! macro is special, and we are unable to replicate its functions by writing regular Rust code.
Replace the call to writeln! with a call to format_args!, passing the result to the write_fmt method on the locked standard output. Note that Rust won’t let you store the result of format_args! in a variable - you need to call it inside the call to write_fmt. Try it for yourself!
Solution
use std::io::Write;
fn main() {
let mut stdout = std::io::stdout();
stdout.write_fmt(format_args!("Hello, World!"));
}Task 4 - Ditch the standard output object
Rather than throw bytes into this mysterious Standard Out object, let’s try and talk to our Operating System directly. We’re going to do this using the libc crate, which provides raw access to the APIs typically found in most C Standard Libraries.
-
Step 1 - Run
cargo add libcto add it as a dependency -
Step 2 - Store your message in a local variable, as a string slice
#![allow(unused)] fn main() { let message = "Hello, World!"; } -
Step 3 - Unsafely call the
libc::writemethod, passing:1as the file descriptor (the standard output has this value, by default)- A pointer to the start of your string slice
- The length of the string in bytes
You can make a pointer from a slice using the as_ptr() method, but this will give you *const u8 and libc::write might want *const c_void. You can use message.as_ptr() as _ to get Rust to cast the pointer into an automatically determined type (the _ means ‘work this out for me’).
You might also find the length of the string needs casting from the default usize to whatever libc wants on your platform.
Solution
fn main() {
let message = "Hello, world";
unsafe {
libc::write(1, message.as_ptr() as _, message.len() as _);
}
}Bare-Metal Firmware on Cortex-R52 - Preparation
This chapter contains information about the QEMU-based exercises, the required software and an installation guide.
This example uses the armv8r-none-eabihf target.
Required Software
QEMU, version 9
Available for Windows, macOS or Linux from https://www.qemu.org/download/
Note that version 8 or lower will not work. It must be version 9 or higher to support the Cortex-R52.
Ensure that once installed you have qemu-system-arm on your path.
Ferrocene or Rust
If you use Ferrocene, you will need stable-25.02.0 or newer. A
criticalup.toml file is provided, you can just criticalup install in the
example directory and an appropriate toolchain will be provided.
If you use Rust, the armv8r-none-eabihf target is only in Tier 3, so you will
need a nightly release from after March 2024. You will also need to compile the
standard library from source - see the README for
more details.
Bare-Metal Firmware on Cortex-R52 - Writing a UART Driver
We have supplied a small Rust no-std application, which is designed to run
inside a QEMU emulation of an Armv8-R Cortex-R52 system. We build the code using
the armv8r-none-eabihf target.
The application lives in
./qemu-code/uart-driver.
The application talks to the outside world through a UART driver. We have provided two - a working one, and a template one that doesn’t work which you need to fix.
Task 1 - Get UART TX working
Modify the template driver and complete the missing code sections as commented. You can peek at the complete driver if you really need to!
This will involve reading and writing to the given registers. You have been
given an MMIO handle for the UART peripheral as self.registers. This is of
type MmioUart, which was automatically generated using the derive_mmio::Mmio
derive-macro based on the register definition at the bottom of the file.
You’ll want to read the derive-mmio
documentation, or run cargo doc --open on your
project to see the API available.
Task 2 - Get UART RX working (Optional)
Continue modifying the UART driver so that you can read data. You’ll need to
enable RX in the configuration register, and add an appropriate method
to read a single byte, returning Option<u8>. Now modify the main loop to
echo back received characters.
You can look in the CMSDK UART documentation to see which bit in the status
register indicates that the 1-byte long RX FIFO has data in it.
Task 3 - Make the UART a global
Creating a UART on the stack is fine, but we would now like to use our UART from anywhere in our program.
To do that, we need to do a few things:
Step 1
Create a static variable, like static UART: T = something(). Work out how to initialise that variable.
Answer
static UART: Uart = unsafe { Uart::new_uart0() };Step 2
Use the critical_section::Mutex type to solve the Sync error that appears.
Answer
static UART: critical_section::Mutex<Uart> = critical_section::Mutex::new(unsafe { Uart::new_uart0() });
// Now every time you touch the UART you must lock the Mutex first
critical_section::with(|cs| {
UART.borrow(cs).enable(115200, PERIPHERAL_CLOCK);
});Step 3
That’s not enough. You only have &self to the Uart and you need &mut self. Try using a RefCell!
Answer
use core::cell::RefCell;
static UART: critical_section::Mutex<RefCell<Uart>> = critical_section::Mutex::new(RefCell::new(unsafe { Uart::new_uart0() }));
// Now every time you touch the UART you must lock the Mutex and borrow the RefCell first
critical_section::with(|cs| {
UART.borrow_ref_mut(cs).enable(115200, PERIPHERAL_CLOCK);
});
critical_section::with(|cs| {
let mut uart = UART.borrow_ref_mut(cs);
_ = writeln!(uart, "Hello, this is Rust!");
});Step 4
That’s a lot of locking. Make a wrapper type called GlobalUart which hides this mess. Implement core::fmt::Write for it so can just writeln!(&UART, "Hello").
Answer
struct GlobalUart {
inner: critical_section::Mutex<RefCell<Uart>>
}
impl GlobalUart {
const fn new() -> GlobalUart {
GlobalUart { inner: critical_section::Mutex::new(RefCell::new(unsafe { Uart::new_uart0() })) }
}
fn enable(&self, baudrate: u32, periph_clk: u32) {
critical_section::with(|cs| {
let mut uart = self.inner.borrow_ref_mut(cs);
uart.enable(baudrate, periph_clk);
});
}
}
static UART: GlobalUart = GlobalUart::new();
// Note that we are implementing the trait for reference-to-GlobalUart because
// we don't have mutable access to our static variable.
impl core::fmt::Write for &GlobalUart {
fn write_str(&mut self, s: &str) -> core::fmt::Result {
for b in s.bytes() {
critical_section::with(|cs| {
let mut uart = self.inner.borrow_ref_mut(cs);
uart.write(b);
});
}
Ok(())
}
}
// Note we are writing into a reference-to-GlobalUart
writeln!(&UART, "Hello, this is Rust!")?;Running the code
You will need QEMU 9 installed and in your $PATH for cargo run to work. This
was the first version with Arm Cortex-R52 emulation.
Running the project gives:
$ cargo run
Compiling uart-exercise v0.1.0 (/Users/jonathan/Documents/ferrous-systems/rust-exercises/qemu-code/uart-driver)
warning: field `registers` is never read
--> src/uart_driver.rs:9:5
|
8 | pub struct Uart {
| ---- field in this struct
9 | registers: MmioRegisters,
| ^^^^^^^^^
|
= note: `#[warn(dead_code)]` on by default
warning: `uart-exercise` (lib) generated 1 warning
Finished `dev` profile [unoptimized + debuginfo] target(s) in 0.87s
Running `qemu-system-arm -machine mps3-an536 -cpu cortex-r52 -semihosting -nographic -kernel target/armv8r-none-eabihf/debug/uart-exercise`
PANIC: PanicInfo { message: I am a panic, location: Location { file: "src/main.rs", line: 45, col: 5 }, can_unwind: true, force_no_backtrace: false }
No UART output (the panic comes on semihosting). But also no-one is using that registers field. You should fix that.
With the Task 1 completed (or using the solution file) you will get:
$ cargo run
Compiling uart-exercise v0.1.0 (/Users/jonathan/Documents/ferrous-systems/rust-exercises/qemu-code/uart-driver)
Finished `dev` profile [unoptimized + debuginfo] target(s) in 0.14s
Running `qemu-system-arm -machine mps3-an536 -cpu cortex-r52 -semihosting -nographic -kernel target/armv8r-none-eabihf/debug/uart-exercise`
Hello, this is Rust!
1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 10.00
2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00 18.00 20.00
3.00 6.00 9.00 12.00 15.00 18.00 21.00 24.00 27.00 30.00
4.00 8.00 12.00 16.00 20.00 24.00 28.00 32.00 36.00 40.00
5.00 10.00 15.00 20.00 25.00 30.00 35.00 40.00 45.00 50.00
6.00 12.00 18.00 24.00 30.00 36.00 42.00 48.00 54.00 60.00
7.00 14.00 21.00 28.00 35.00 42.00 49.00 56.00 63.00 70.00
8.00 16.00 24.00 32.00 40.00 48.00 56.00 64.00 72.00 80.00
9.00 18.00 27.00 36.00 45.00 54.00 63.00 72.00 81.00 90.00
10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00
PANIC: PanicInfo { payload: Any { .. }, message: Some(I am a panic), location: Location { file: "src/main.rs", line: 43, col: 5 }, can_unwind: true, force_no_backtrace: false }